![Bridging the Sim-to-Real Gap: How Antioch is Transforming Physical AI Development [2025]](https://tryrunable.com/blog/bridging-the-sim-to-real-gap-how-antioch-is-transforming-phy/image-1-1776344928184.jpg)
Bridging the Sim-to-Real Gap: How Antioch is Transforming Physical AI Development [2025]
Developing physical AI has always been a complex challenge. While digital AI's capabilities have surged ahead with the help of vast datasets and powerful computational models, physical AI—AI that interacts with the real, tangible world—lags behind. The reason? A lack of quality data from physical environments and the inherent difficulties in simulating reality. Enter Antioch, a startup determined to close the sim-to-real gap, which refers to the challenge of making virtual environments realistic enough that robots trained inside them can operate reliably in the physical world.
In this article, we'll dive deep into how Antioch's innovations are setting the stage for a new era in robotics and physical AI. We'll explore the technology, its implementation, potential pitfalls, and what the future holds.
TL; DR
- Antioch is redefining robotic simulations to make them as realistic as possible.
- Reducing the sim-to-real gap is critical for reliable robotic deployment.
- Simulation offers scalable training environments for physical AI.
- Pitfalls include ensuring simulation accuracy, which Antioch addresses.
- Future trends point to more integrated AI systems with Antioch leading innovations.

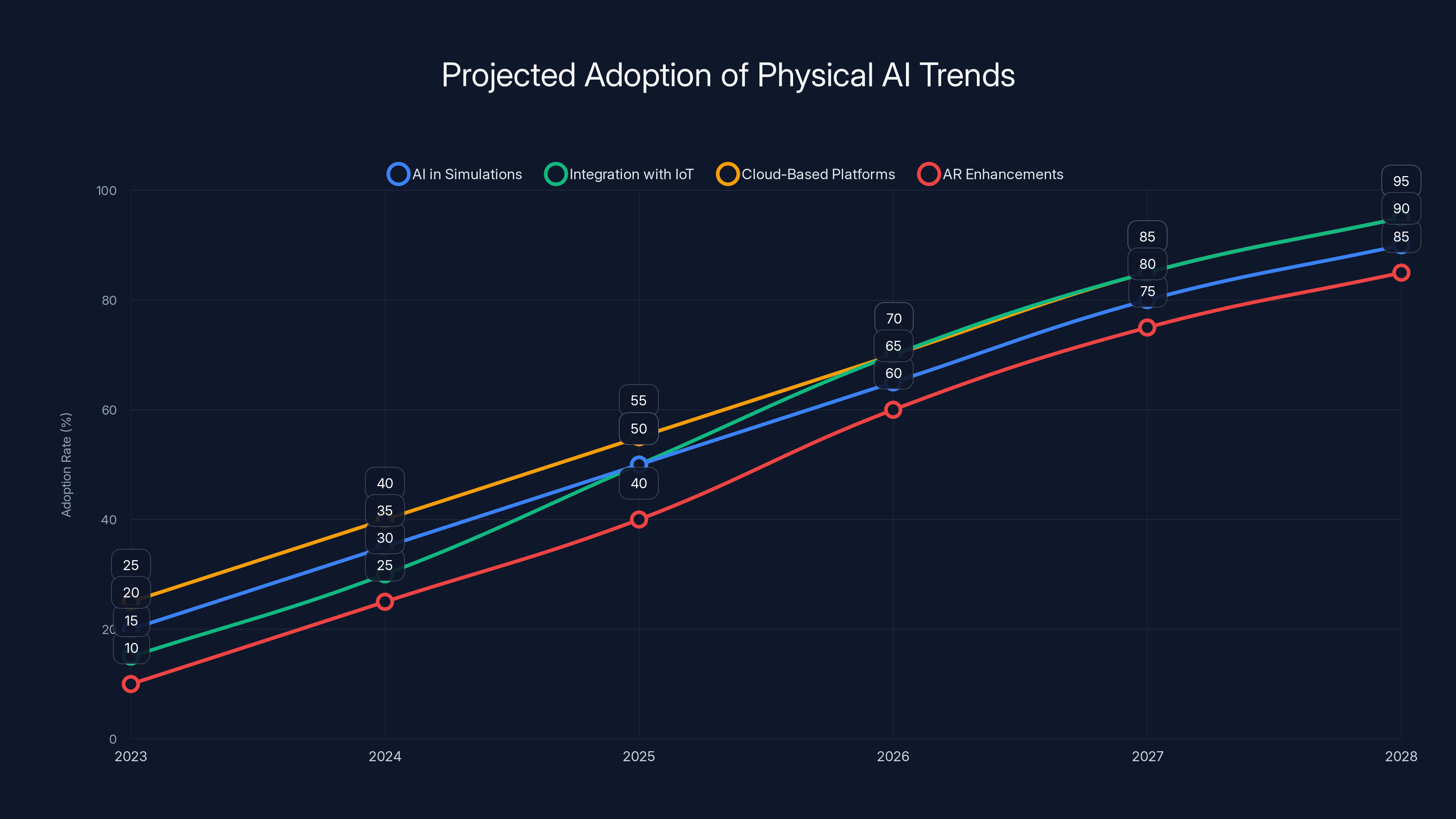
Projected data suggests significant growth in the adoption of AI in simulations, IoT integration, cloud-based platforms, and AR enhancements by 2028. Estimated data.
Introduction to Physical AI
Physical AI refers to artificial intelligence that interacts with the real world, often through robotics. Unlike digital AI, which operates in a virtual space, physical AI must contend with unpredictable environments, diverse materials, and countless variables that digital counterparts don't face.
The Challenges of Physical AI
- Data Scarcity: Unlike digital AI, which can harness vast digital datasets, physical AI lacks comprehensive, high-quality datasets from real-world environments.
- Environmental Complexity: Physical environments are inherently complex and dynamic, making them tough to replicate in a controlled setting.
- Costly Testing: Building and iterating on physical prototypes is resource-intensive and costly, as noted in a recent study.

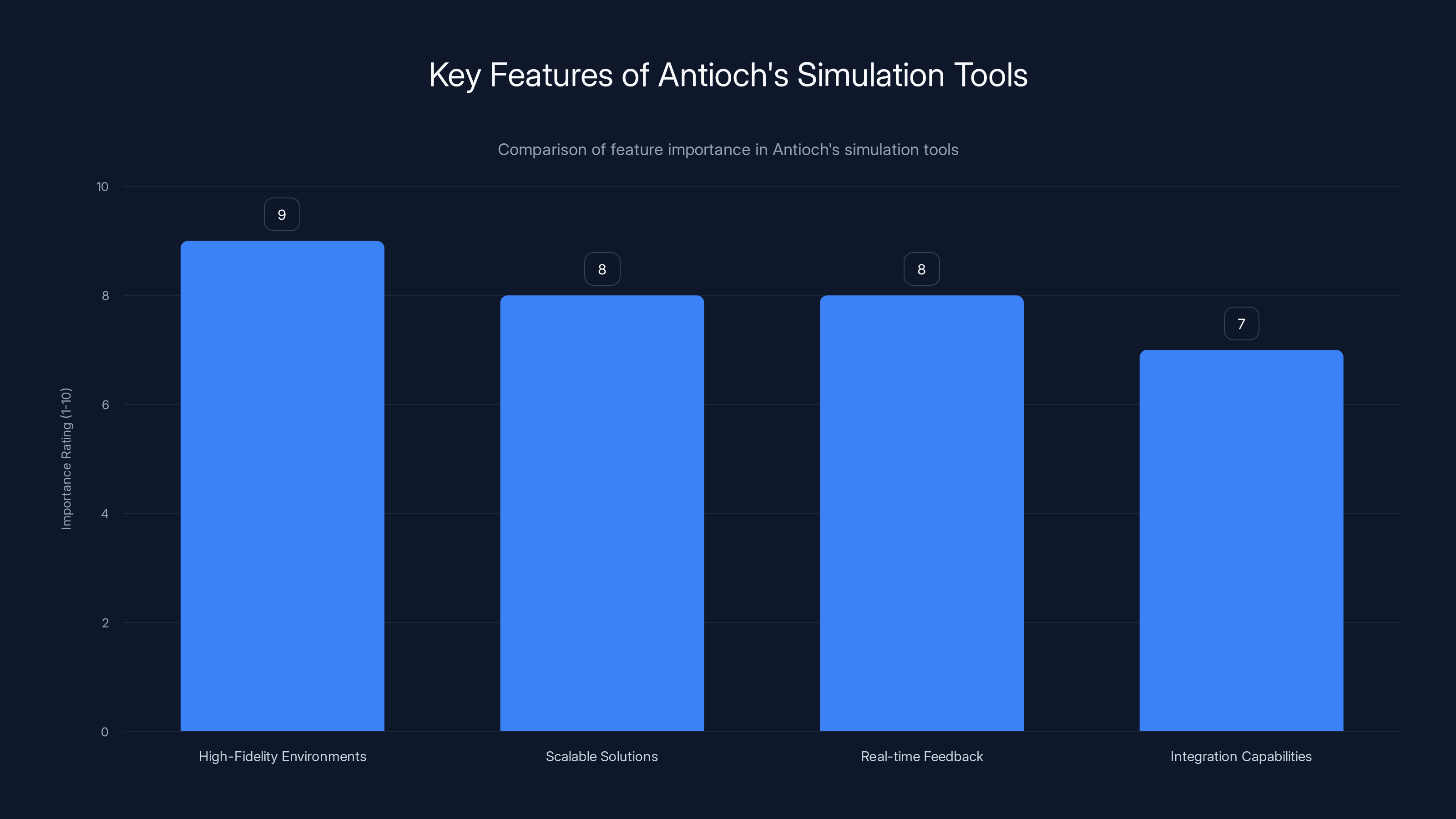
Antioch's simulation tools are highly rated for their high-fidelity environments and scalable solutions, crucial for effective robotic training.
Antioch's Approach to Simulation
Antioch is pioneering a new approach to simulation by creating highly detailed virtual replicas of real-world environments. These simulations are designed to provide the data and workspaces that roboticists need in a scalable and cost-effective manner.
Key Features of Antioch's Simulation Tools
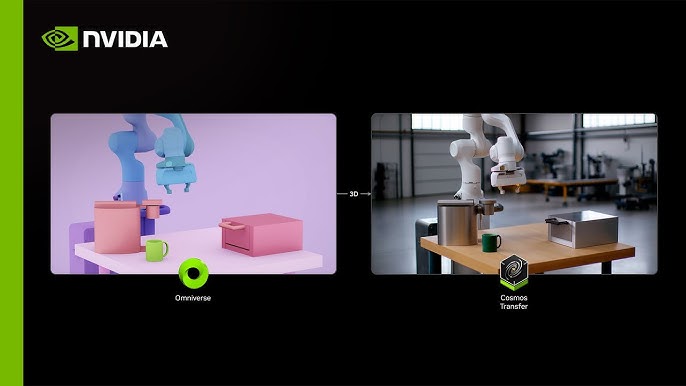
- High-Fidelity Environments: Antioch's simulations are designed to mimic real-world conditions as closely as possible, similar to the capabilities highlighted in NVIDIA's Omniverse libraries.
- Scalable Solutions: Their tools can scale from small lab environments to full-scale factories.
- Real-time Feedback: Offers instant feedback to developers, allowing for rapid iteration.
- Integration Capabilities: Antioch's platform can integrate with existing robotic frameworks and tools, making adoption seamless.
Use Case: Training Autonomous Warehouse Robots
Imagine a warehouse filled with autonomous robots tasked with picking and placing items. Antioch's simulation tools allow developers to create a virtual replica of this warehouse, complete with shelves, inventory, and even variable lighting conditions. Developers can train robots within this virtual space, tweaking their algorithms until they achieve optimal performance—without the risk of damaging real-world inventory or equipment.
Bridging the Sim-to-Real Gap
The sim-to-real gap is a critical hurdle in physical AI development. While simulations offer a controlled environment for training, the real world is unpredictable.
Strategies to Bridge the Gap
- Enhanced Sensor Simulation: Antioch's tools simulate a wide range of sensors, allowing robots to 'see', 'hear', and 'feel' the virtual world much like they would in reality.
- Physics Accuracy: By incorporating advanced physics engines, Antioch ensures that interactions within the simulation follow real-world physics laws.
- Adaptive Learning Algorithms: These algorithms allow robotic systems to adapt to discrepancies between simulated and real environments, a concept explored in BCG's analysis.

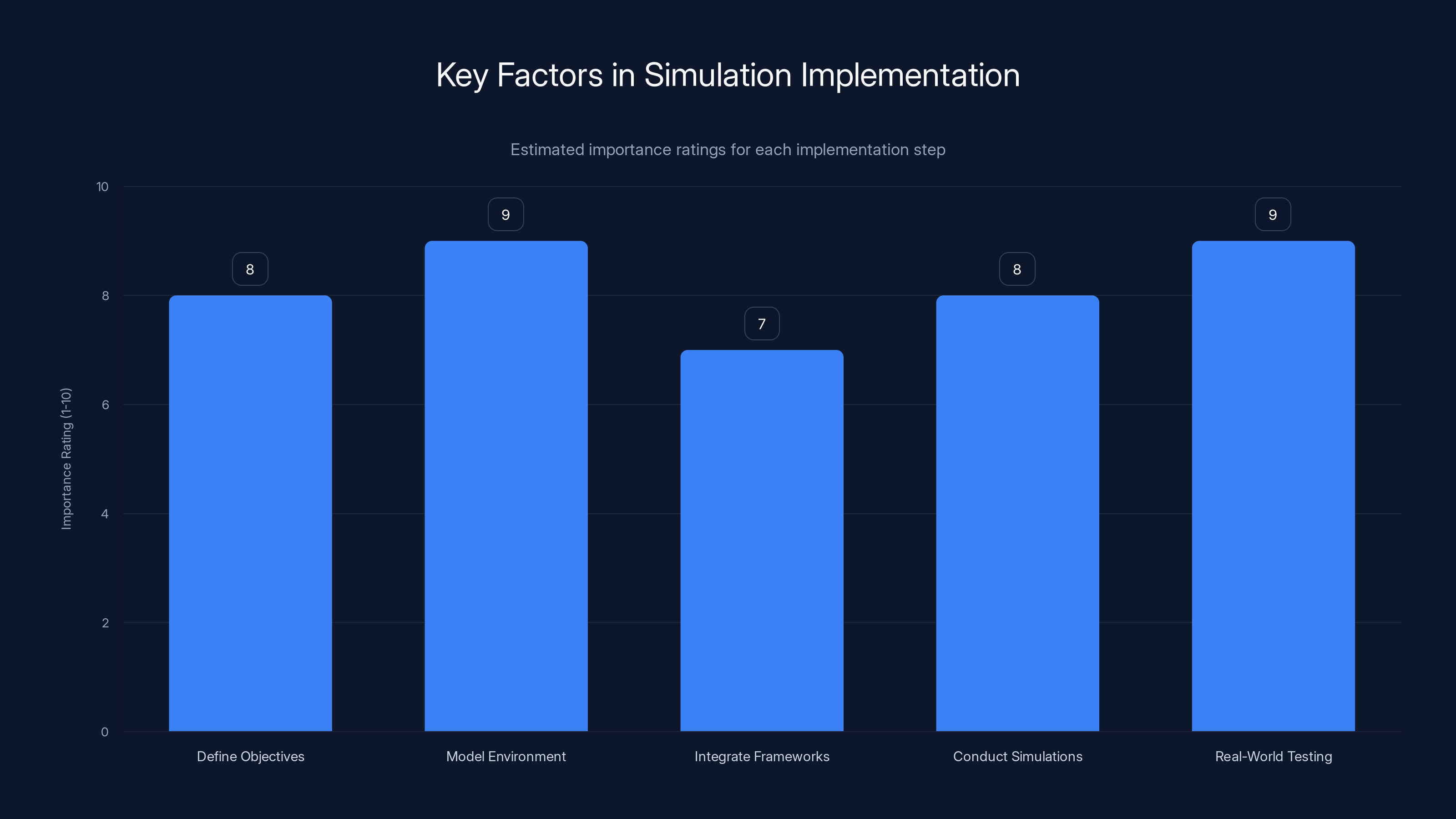
Modeling the environment and real-world testing are crucial steps in simulation implementation, each rated 9 out of 10 in importance. Estimated data.
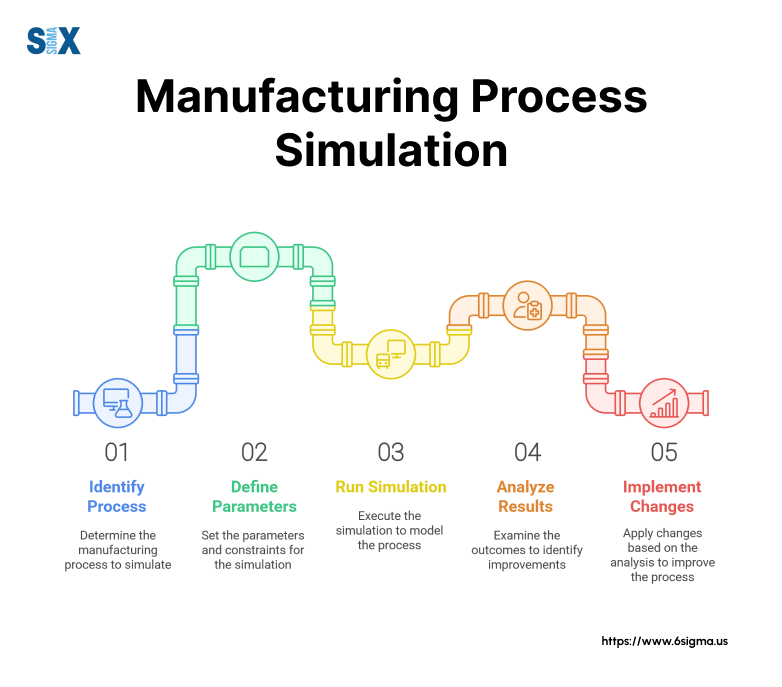
Practical Implementation Guide
Implementing Antioch's simulation tools requires careful planning and execution. Here's a step-by-step guide:
Step 1: Define Objectives
Determine what you hope to achieve with your simulation. Are you testing a new navigation algorithm? Evaluating sensor placements?
Step 2: Model the Environment
Create a virtual model of the environment where the robot will operate. This includes mapping out physical spaces, obstacles, and any moving parts, as emphasized in recent research on 3D CAD models.
Step 3: Integrate Robotics Frameworks
Antioch's tools are compatible with popular robotic frameworks like ROS (Robot Operating System). Integrate these to streamline your development process.
Step 4: Conduct Simulations
Run multiple simulations to test different scenarios and collect data. Adjust parameters as needed to refine robot behavior.
Step 5: Real-World Testing
Once you have satisfactory results in simulation, conduct small-scale tests in a controlled real-world environment to verify your findings.
Common Pitfalls and Solutions
While Antioch's tools are designed to minimize the sim-to-real gap, developers may still encounter challenges.
Pitfall 1: Over-reliance on Simulations
Solution: Always validate simulation results with real-world tests to ensure accuracy and reliability.
Pitfall 2: Inaccurate Sensor Models
Solution: Regularly update sensor models to reflect the latest technology and environmental changes.
Pitfall 3: Complexity in Large-Scale Environments
Solution: Break down large-scale simulations into manageable modules and integrate them gradually.
Future Trends in Physical AI and Simulation
The future of physical AI is promising, with several trends on the horizon:
1. Increased Use of AI in Simulations
AI will play a bigger role in generating more realistic simulations by dynamically adjusting parameters to mimic real-world unpredictability, as discussed in market forecasts.
2. Integration with IoT Devices
By integrating IoT sensors, simulations will gain a real-time data influx, making them more accurate and adaptable, a trend highlighted in Robotics Tomorrow.
3. Cloud-Based Simulation Platforms
As internet speeds increase and cloud services become more robust, expect simulations to move to the cloud, allowing for greater accessibility and collaboration.
4. Augmented Reality Enhancements
Augmented reality (AR) could allow developers to overlay simulation data onto physical environments, providing a new dimension of interaction.
Recommendations for Developers
To maximize the potential of Antioch's simulation tools, developers should consider the following best practices:
- Stay Updated on Simulation Technologies: Simulation tech evolves rapidly; staying informed will ensure you leverage the latest advancements.
- Incorporate Feedback Loops: Use feedback from real-world tests to continually refine simulations.
- Collaborate Across Disciplines: Engage with experts in physics, AI, and robotics to create holistic simulation environments.
Conclusion
Antioch is at the forefront of bridging the sim-to-real gap in physical AI development. By creating realistic, scalable simulations, they are paving the way for more efficient, reliable robotic systems. As the technology evolves, the integration of AI, AR, and IoT will further enhance these capabilities, making the dream of seamless physical AI a reality.
As we continue to push the boundaries of what's possible in physical AI, Antioch's innovations serve as a reminder that the future of robotics is not just about building smarter machines—it's about creating environments where they can truly thrive.
FAQ
What is the sim-to-real gap?
The sim-to-real gap refers to the differences between simulated environments and the real world, which can affect how well robots trained in simulations perform in reality.
How does Antioch address the sim-to-real gap?
Antioch uses high-fidelity simulations, advanced physics engines, and adaptive learning algorithms to make simulations more realistic and reliable.
What are the benefits of using simulation in robotics?
Benefits include scalable testing environments, reduced development costs, and the ability to train robots in diverse scenarios without real-world risks.
How can developers get started with Antioch's tools?
Developers can start by modeling their environments, integrating Antioch's tools with existing frameworks, and conducting iterative simulations and real-world tests.
What future trends are expected in simulation technology?
Trends include increased AI integration, cloud-based platforms, IoT-enhanced simulations, and augmented reality overlays for deeper interaction.
Are there any limitations to simulation-based training?
While simulations are powerful, they can't capture every real-world variable. It's crucial to validate findings with real-world testing to ensure reliability.

Key Takeaways
- Antioch is pioneering realistic simulations for physical AI.
- Bridging the sim-to-real gap is crucial for reliable robotics.
- Simulations offer scalable, cost-effective training environments.
- Common pitfalls include over-reliance on simulations without real-world validation.
- Future trends include AI integration and cloud-based simulations.
Related Articles
- Govee LED Lightwall: Transforming Interiors with Innovation [2025]
- Understanding China's Compute Capacity and Global Competition [2025]
- Opera's Game-Changing Browser Connector: AI Chatbots at Your Fingertips [2025]
- Google's New Desktop Apps for Windows and MacOS: Complete Guide [2025]
- Accel's $5B Late-Stage Investment Strategy [2025]
- Snap's Strategic Pivot: Workforce Reductions and AI Integration [2025]

