![Revolutionizing Robotics: How New Software Prevents Joint Jamming [2025]](https://tryrunable.com/blog/revolutionizing-robotics-how-new-software-prevents-joint-jam/image-1-1777203232270.jpg)
Revolutionizing Robotics: How New Software Prevents Joint Jamming [2025]
In the ever-evolving world of robotics, one persistent challenge has been the jamming of robotic joints during operation. This issue not only hampers efficiency but also poses a risk to the longevity and reliability of robotic systems. However, recent advancements in control software are poised to change this landscape by preventing joint jams and enabling robots to learn from each other, regardless of their hardware differences.
TL; DR
- New software prevents joint jamming: Enhances robotic efficiency and longevity.
- Cross-platform learning: Robots can learn from each other, even if they're different models.
- Kinematic Intelligence: A framework enabling seamless skill transfer between robots.
- Real-world applications: From industrial automation to personalized home robotics.
- Future trends: AI integration and adaptive learning for smarter robotics.
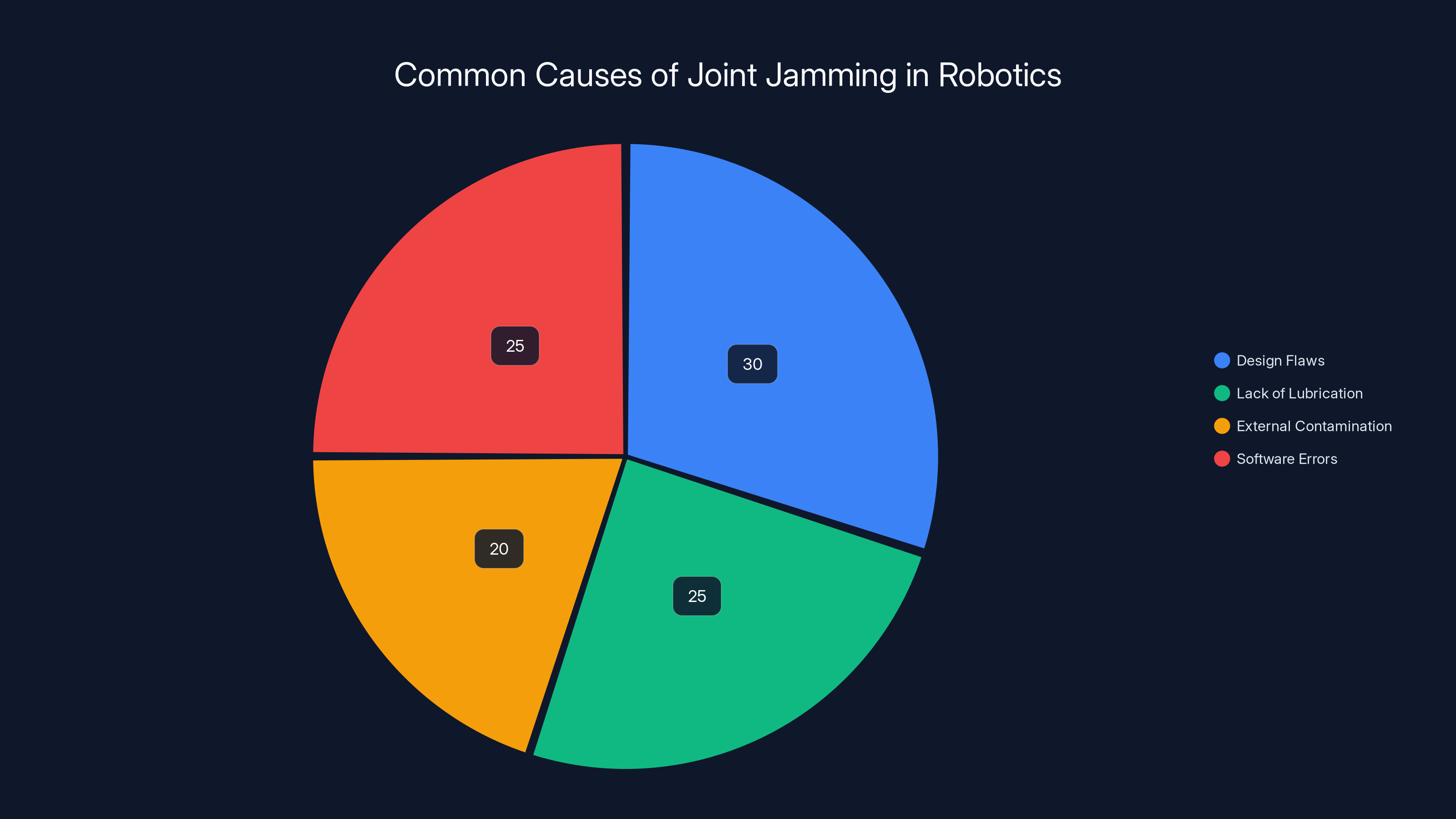
Design flaws and software errors are common causes of joint jamming, each accounting for about 30% and 25% respectively. Estimated data.
Understanding the Problem: Joint Jamming
Joint jamming occurs when the mechanical parts of a robot's joint become obstructed or fail to move smoothly. This can result from design flaws, improper lubrication, or external factors such as debris. The consequences are significant, leading to increased wear and tear, operational downtime, and the potential for costly repairs.
Common Causes of Joint Jamming
- Design Flaws: Poorly designed joints that do not account for the full range of motion or load can lead to jamming.
- Lack of Lubrication: Without proper lubrication, friction increases, leading to heat buildup and eventual jamming.
- External Contamination: Dust, dirt, and other particles can infiltrate joints, causing blockages.
- Software Errors: Inaccurate control signals can force joints into unnatural positions, causing jams.
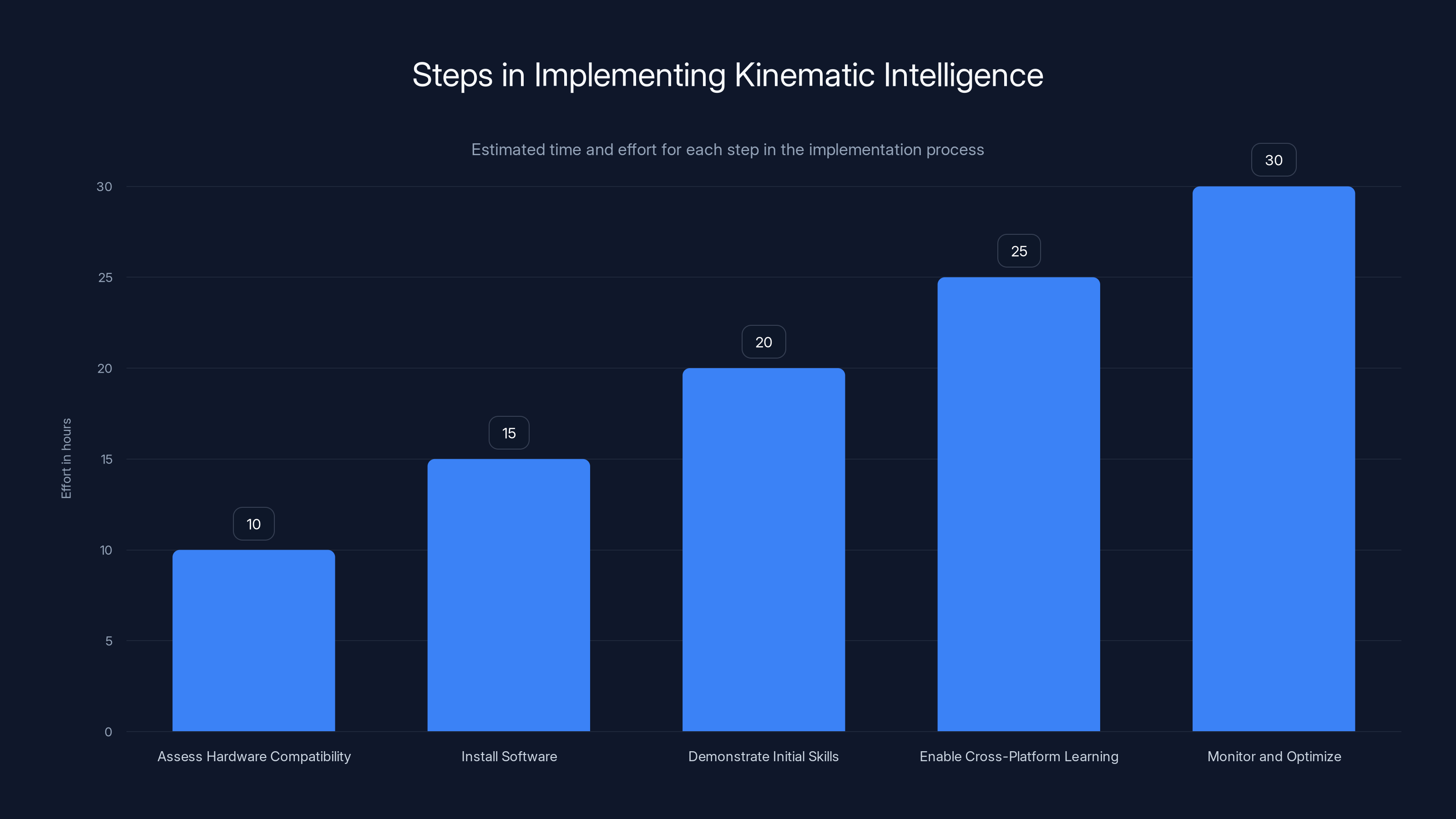
Estimated data shows that 'Monitor and Optimize' requires the most effort, highlighting the importance of ongoing system refinement.
The Solution: Kinematic Intelligence
Enter Kinematic Intelligence, a revolutionary framework developed by researchers at the Swiss École Polytechnique Fédérale de Lausanne (EPFL). This software enables robots to operate more like smartphones—interchangeable and adaptable. With Kinematic Intelligence, robots can learn skills by demonstration and apply them across different platforms without hardware constraints.
How Kinematic Intelligence Works
Kinematic Intelligence works by creating a virtual representation of a robot's movements and capabilities. This representation can be shared and understood by other robots, allowing them to replicate tasks without direct programming. Here's a breakdown of its key components:
- Virtual Kinematics Model (VKM): A digital twin of the robot's physical structure and movement capabilities.
- Skill Transfer Protocol (STP): A set of guidelines for transmitting skills between robots using VKM.
- Adaptive Learning Algorithms: AI-driven algorithms that enable robots to refine skills based on feedback and environmental changes.

Real-World Applications
The potential applications for Kinematic Intelligence are vast and varied, ranging from industrial settings to personal robotics. Here are some notable examples:
Industrial Automation
In manufacturing, robots equipped with Kinematic Intelligence can switch tasks or adapt to new processes with minimal downtime. This flexibility reduces the need for manual reprogramming and allows for more efficient production lines.
- Example: A robot arm initially programmed for assembly tasks can quickly retool for quality inspection, adapting its movements based on learned skills from other robots.
Personalized Home Robotics
For home use, robots can learn personalized tasks suited to individual user preferences. This adaptability makes home robotics more accessible and practical for a wider audience.
- Example: A domestic robot learns to clean a specific home layout and can share this knowledge with other household robots, optimizing cleaning routines.
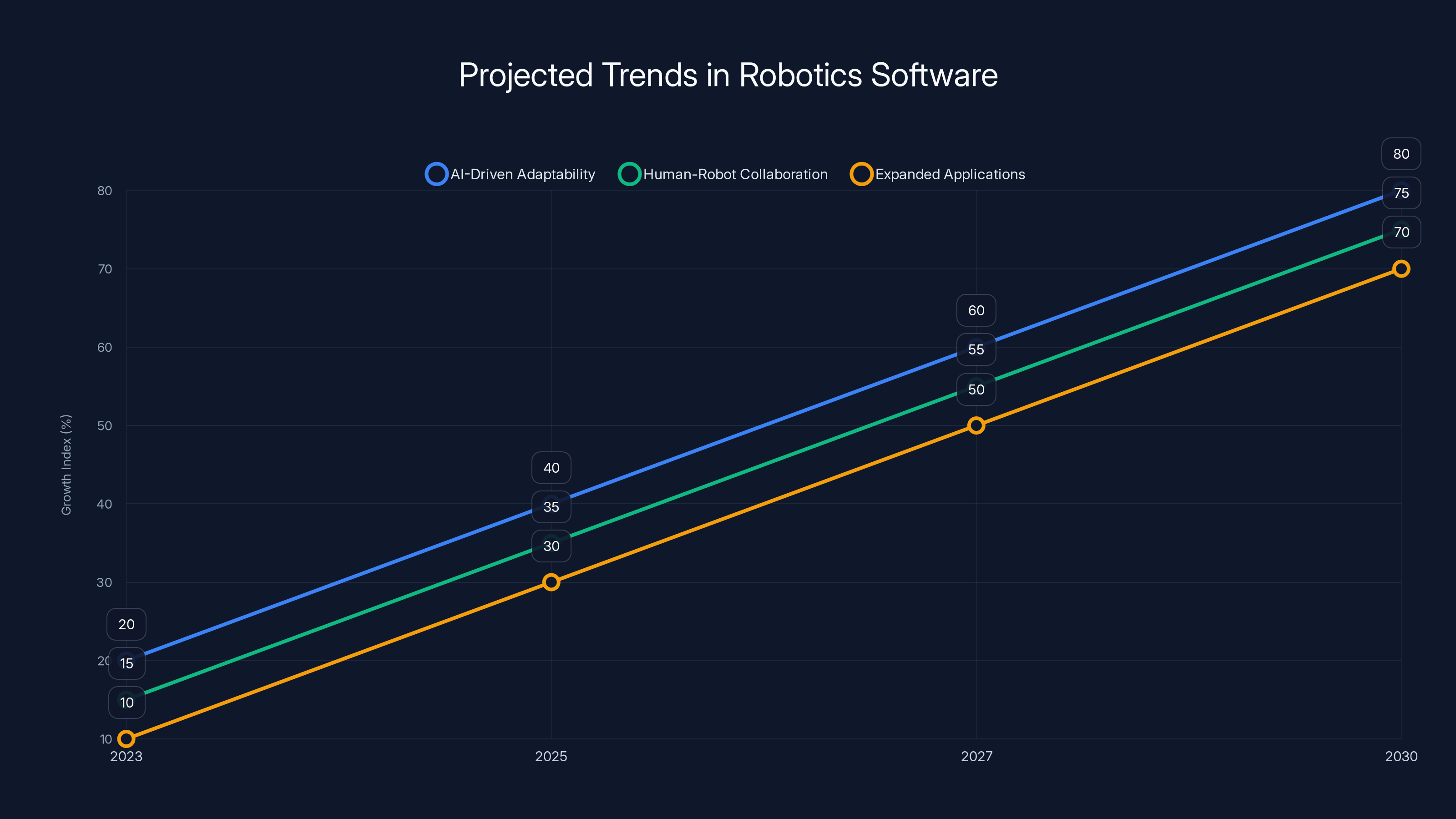
By 2030, AI-driven adaptability and human-robot collaboration in robotics software are expected to grow significantly, enhancing autonomy and interaction. Estimated data.
Implementing Kinematic Intelligence: A Step-by-Step Guide
Implementing Kinematic Intelligence in your robotic systems involves several key steps:
- Assess Hardware Compatibility: Ensure that your robotic platform can support the virtual kinematics model.
- Install Kinematic Intelligence Software: Integrate the software into your existing control systems.
- Demonstrate Initial Skills: Use a demonstration-based approach to teach initial tasks to the robot.
- Enable Cross-Platform Learning: Allow robots to exchange skills and adapt to new tasks using the skill transfer protocol.
- Monitor and Optimize: Continuously monitor performance and adjust parameters to enhance efficiency.
Common Pitfalls and Solutions
Pitfall 1: Incompatible Hardware
Solution: Conduct a thorough hardware audit before implementation to ensure compatibility with Kinematic Intelligence protocols.
Pitfall 2: Inaccurate Skill Transfer
Solution: Use high-fidelity sensors and precise calibration to improve the accuracy of skill demonstrations.
Pitfall 3: Software Integration Challenges
Solution: Work closely with software developers to ensure seamless integration and address potential bugs early.

Future Trends in Robotics Software
As robotics technology continues to advance, the integration of AI and machine learning will play a pivotal role in shaping the future of robotic control software. Here are some anticipated trends:
AI-Driven Adaptability
Robots will become increasingly autonomous, using AI to adapt to changing environments and tasks without human intervention. According to ARC Advisory Group, this adaptability is crucial for the future of industrial automation.
Enhanced Human-Robot Collaboration
Future software will focus on improving the synergy between humans and robots, enabling more intuitive interaction and cooperation.
Expanded Applications
As technology improves, the range of applications for robotics will expand, including areas such as healthcare, agriculture, and disaster response. EurekAlert highlights the potential for robots to assist in complex tasks by observing human actions.
Conclusion
The development of software that prevents robotic joint jamming, like Kinematic Intelligence, marks a significant milestone in the evolution of robotics. By enabling cross-platform learning and reducing operational inefficiencies, this technology not only enhances the capabilities of individual robots but also paves the way for a more interconnected and adaptable robotic ecosystem.
Use Case: Automate your factory's production line with cross-platform robotic learning using Runable's advanced AI agents.
Try Runable For Free
FAQ
What is Kinematic Intelligence?
Kinematic Intelligence is a software framework that enables robots to learn and share skills across different hardware platforms, preventing joint jamming and enhancing adaptability. According to The Debrief, this technology allows robots to learn complex tasks by observing humans and other robots.
How does it prevent joint jamming?
The software uses virtual kinematics models and adaptive learning algorithms to ensure smooth and efficient joint movements, reducing the risk of jams.
What are the benefits of this technology?
Benefits include improved robotic efficiency, reduced downtime, enhanced cross-platform learning, and greater adaptability to new tasks and environments.
Can it be applied to all robots?
While the technology is versatile, compatibility depends on the robot's hardware and ability to integrate the necessary software components.
How does it compare to traditional programming?
Traditional programming requires extensive coding and manual adjustments, whereas Kinematic Intelligence allows for more intuitive skill transfer and adaptability.
What industries can benefit from this?
Industries such as manufacturing, healthcare, logistics, and home automation can significantly benefit from the enhanced capabilities offered by Kinematic Intelligence.
What are the future implications?
The future implications include more autonomous robots, improved human-robot collaboration, and expanded applications across various sectors.
Is Kinematic Intelligence cost-effective?
Yes, by reducing downtime and increasing efficiency, the technology offers cost savings and a strong return on investment.
How does it integrate with existing systems?
Integration involves installing the software and configuring it to work with existing robotic control systems, often requiring collaboration with developers.
What are the limitations?
Current limitations include hardware compatibility and the need for precise calibration to ensure accurate skill transfer.

Key Takeaways
- New software prevents robotic joint jamming, enhancing efficiency.
- Kinematic Intelligence enables cross-platform learning among robots.
- Real-world applications include industrial automation and home robotics.
- AI-driven adaptability will shape the future of robotic control software.
- Integration challenges include hardware compatibility and software integration.
Related Articles
- How Automation is Transforming Mining: Insights from Mariana Minerals and Pronto
- If You Think This Unitree G1 Robot Rollerblading is Scary, Wait Until You See it Ice Skating: The Inevitable Rise of Robot Winter Olympics [2025]
- The Rise of Robot-Driven Warehouses: How Automation is Redefining Logistics [2025]
- Tech Overhaul on the ISS: Navigating the Next Frontier [2025]
- When Robots Run: The Future of Racing and Robotics [2025]
- Breaking Boundaries: How Humanoid Robots Are Redefining Marathon Records [2025]

