![Harvard's 3D-Printed Robotic Muscles: The Future of Soft Robotics [2025]](https://tryrunable.com/blog/harvard-s-3d-printed-robotic-muscles-the-future-of-soft-robo/image-1-1771162758692.jpg)
Harvard's 3D-Printed Robotic Muscles: The Future of Soft Robotics [2025]
Last year, something genuinely wild happened in a Harvard engineering lab. Researchers figured out how to print functional robotic muscles in one shot. Not in pieces you assemble later. One. Single. Print.
I'll be honest, when I first read about this, my brain went two directions at once. The engineer in me thought, "This is incredible—we're talking about collapsing weeks of assembly into minutes." The other part of me thought about the implications. And yeah, there's a reason the original coverage used words like "slightly terrifying."
The technique is called rotational multi-material 3D printing, and it represents something we haven't really nailed before: the ability to encode movement logic directly into a physical structure during the printing process itself. These aren't robots with motors bolted on top. These are actuators where the movement is the material.
Here's what makes this different from everything we've tried before.
TL; DR
- The Breakthrough: Harvard engineers created robotic muscles using rotational multi-material 3D printing, allowing movement to be encoded directly during printing. This was highlighted in a report by Voxel Matters.
- How It Works: Hollow polyurethane tubes filled with air or fluid enable pre-programmed bending, twisting, and lifting movements in a single print, as detailed in Harvard's official news release.
- Speed Advantage: Complex soft robot structures that previously took days or weeks to assemble now print in hours, according to EurekAlert.
- Real Applications: From prosthetics and underwater construction to industrial manipulation, the potential use cases span multiple industries, as noted in McGill University's research.
- The Catch: Speed and simplicity raise serious questions about oversight, safety, and ethical deployment in human-adjacent environments, as discussed in TechRadar.
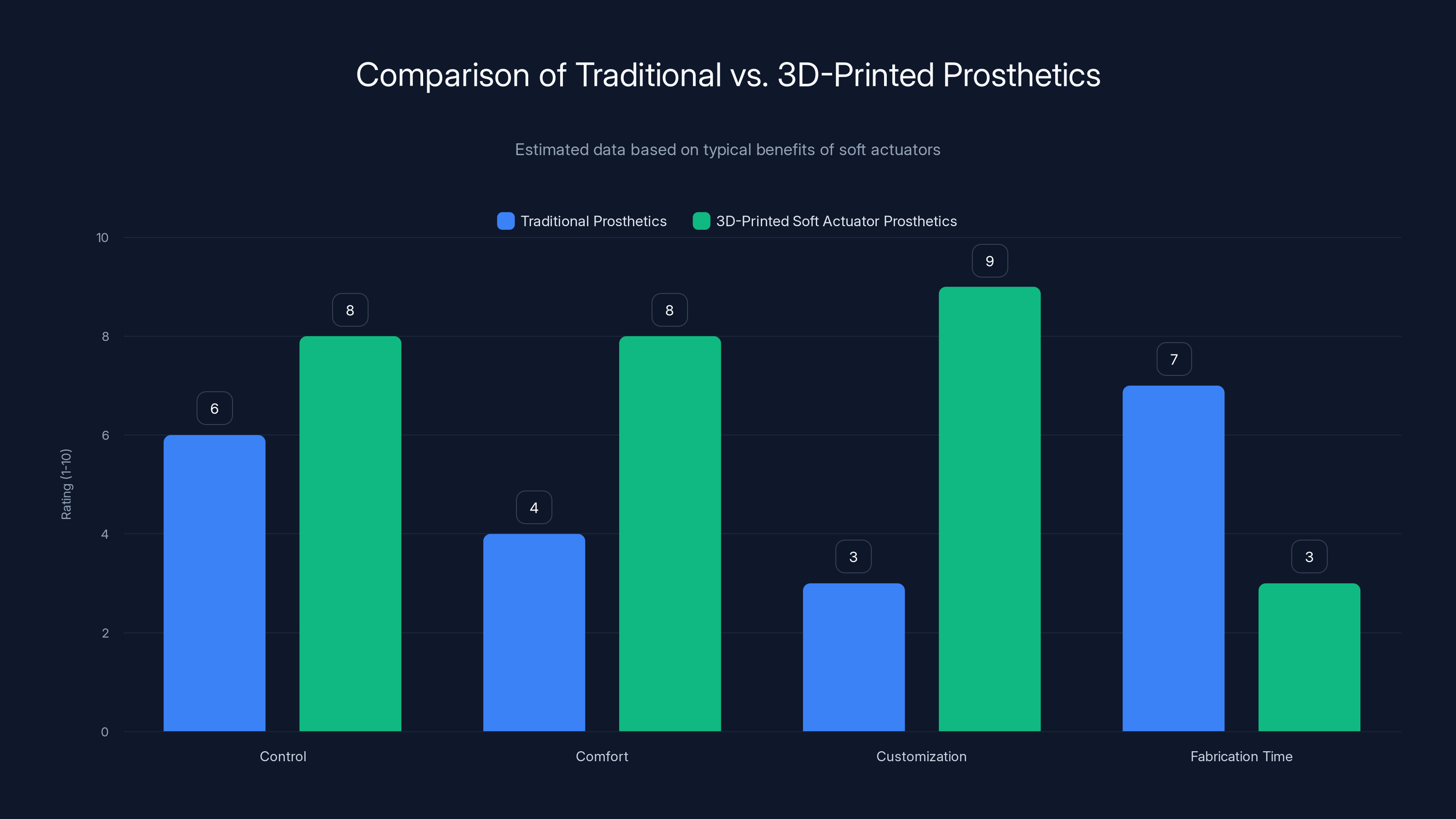
3D-printed soft actuator prosthetics offer superior comfort, customization, and reduced fabrication time compared to traditional prosthetics. Estimated data.
The Problem That's Been Haunting Soft Robotics
Soft robotics has always been stuck in a manufacturing bottleneck. Think about traditional flexible robot design for a second. You'd 3D print individual components, let them cure, remove support material, maybe treat them chemically. Then you'd hand-assemble everything piece by piece, like building a tiny origami sculpture from hell.
A single soft gripper might take a team days to create. You're molding one part, waiting for it to set, then attaching pneumatic tubes, testing for leaks, troubleshooting failures. Each component is a separate problem to solve.
This matters because soft robotics is genuinely useful. Unlike rigid metal robots that smash things, soft actuators can handle delicate objects, work safely around humans, and bend into complex shapes for tight spaces. But the manufacturing process has always been the chokepoint. It's been expensive, slow, and requires specialized labor.
That's the specific problem Harvard's team was trying to crack. How do you get the benefits of soft robotics without spending six months on fabrication?
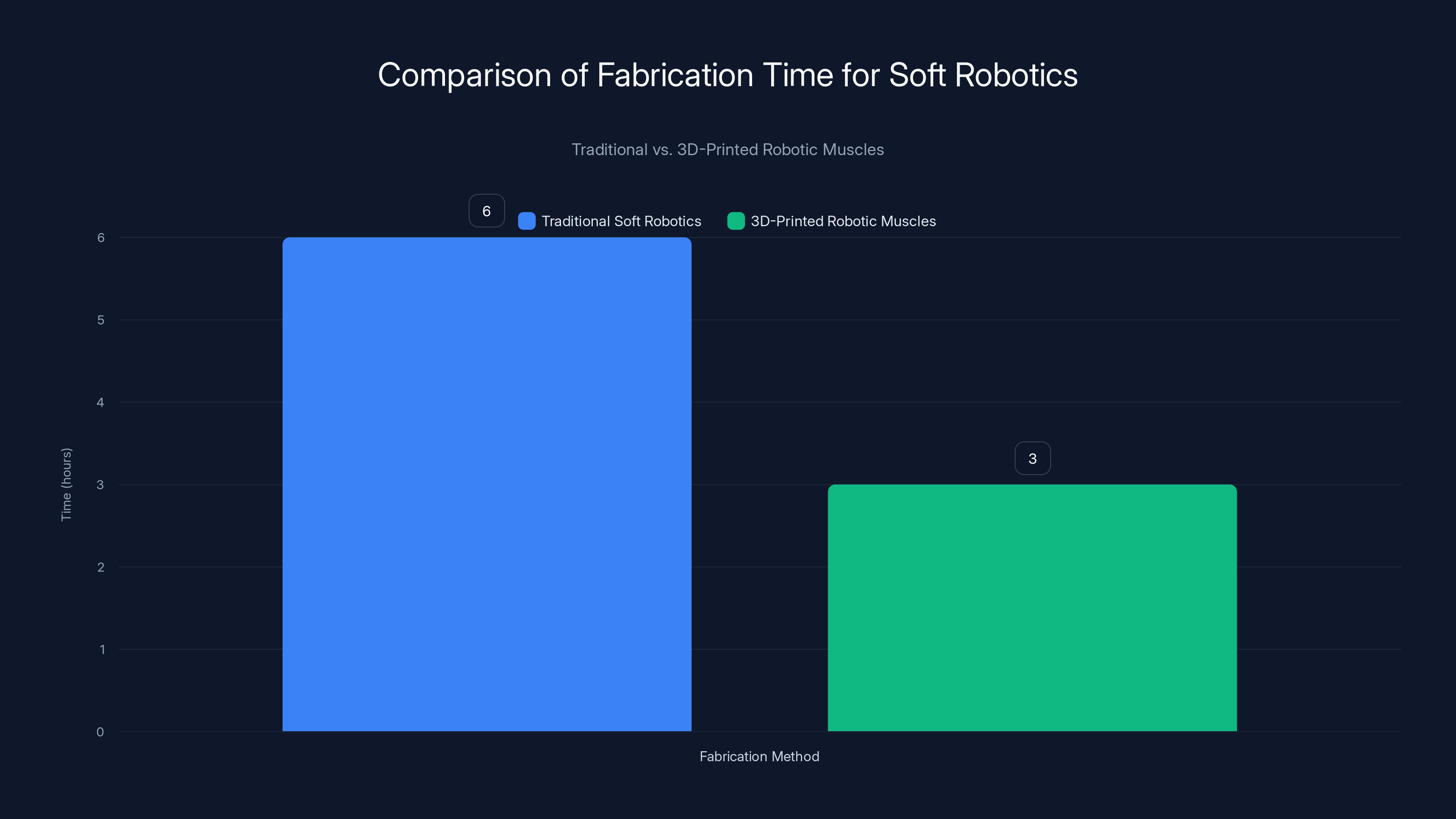
3D-printed robotic muscles significantly reduce fabrication time from 5-7 days to just 2-4 hours, enhancing efficiency and consistency. Estimated data.
How Rotational Multi-Material 3D Printing Actually Works
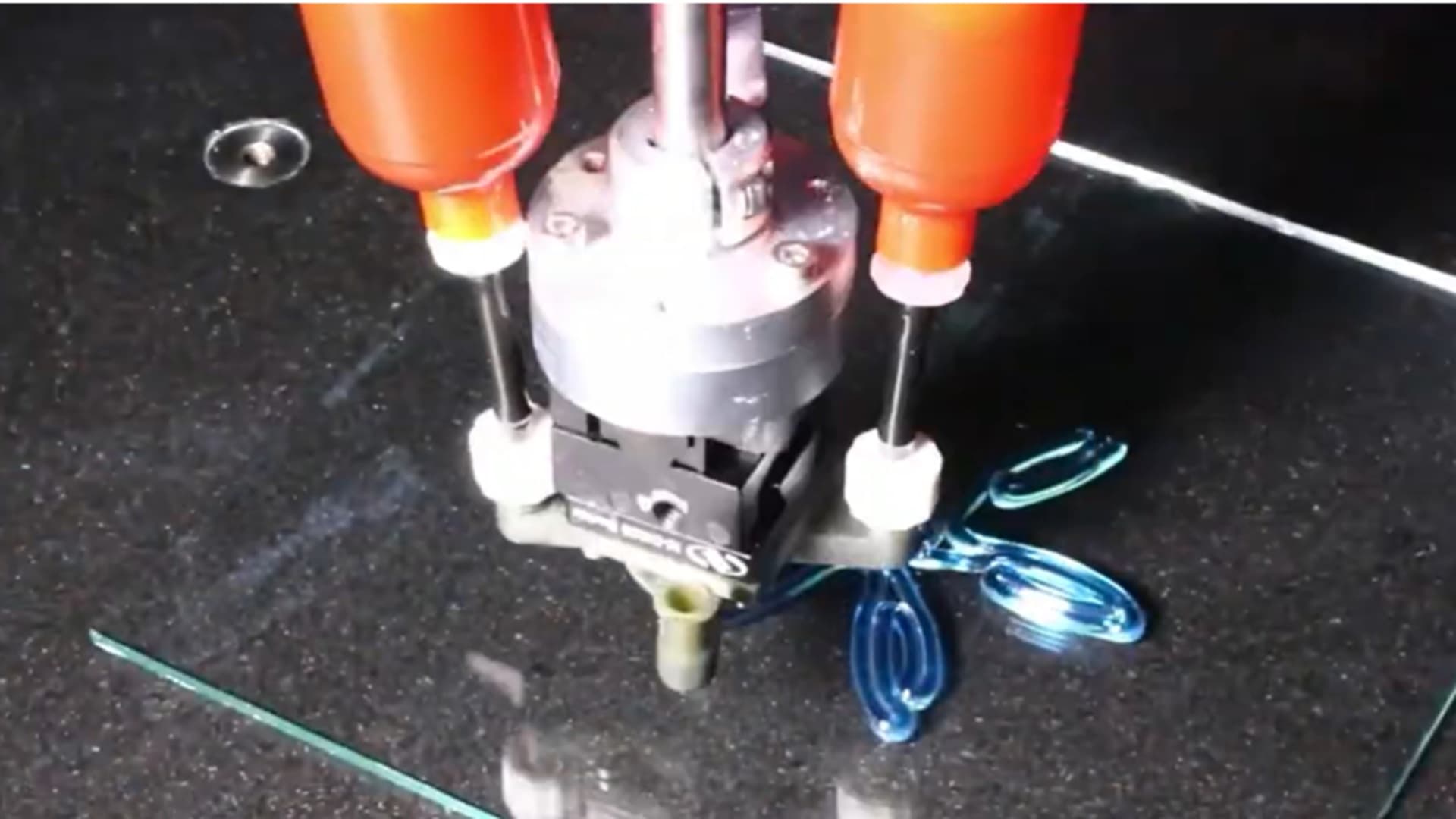
Okay, so here's where the technical elegance comes in. The Harvard team designed a novel nozzle setup that does something most 3D printers can't: it rotates continuously while printing, and it can deposit multiple materials simultaneously through the same nozzle, as explained in 3D Printing Industry.
The basic material stack is smart. You're printing an outer shell of strong polyurethane. That outer layer provides structural integrity and protection. But inside that shell? You're depositing a gel-like polymer called poloxamer. Here's the clever part: poloxamer is designed to be removed after printing.
So you print the whole structure. Then you wash away the interior gel using heat and solvent. What's left behind are perfectly calibrated hollow tubes and chambers. These hollow structures become your actuators. Fill them with pressurized air or fluid, and they move in exactly the pattern you encoded during printing.
The rotation of the nozzle itself becomes data. The speed of rotation, the material flow rate, the precise positioning as it spirals around—all of these variables are calibrated to determine exactly how and where the final structure will move. It's like encoding choreography directly into the polymer chains.
Think of it this way: a traditional printer uses X, Y, and Z coordinates. This printer uses X, Y, Z, and the rotation angle itself as a variable that affects the final material properties. That's an extra degree of freedom that lets you embed movement logic directly into the geometry.
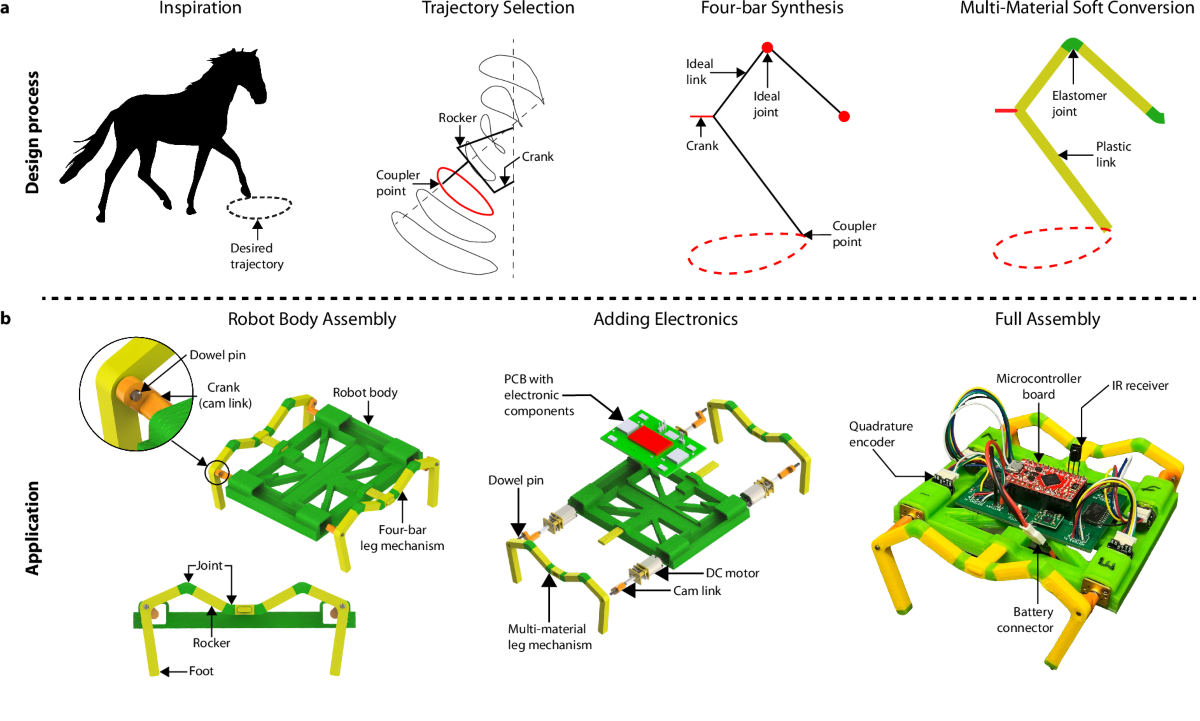
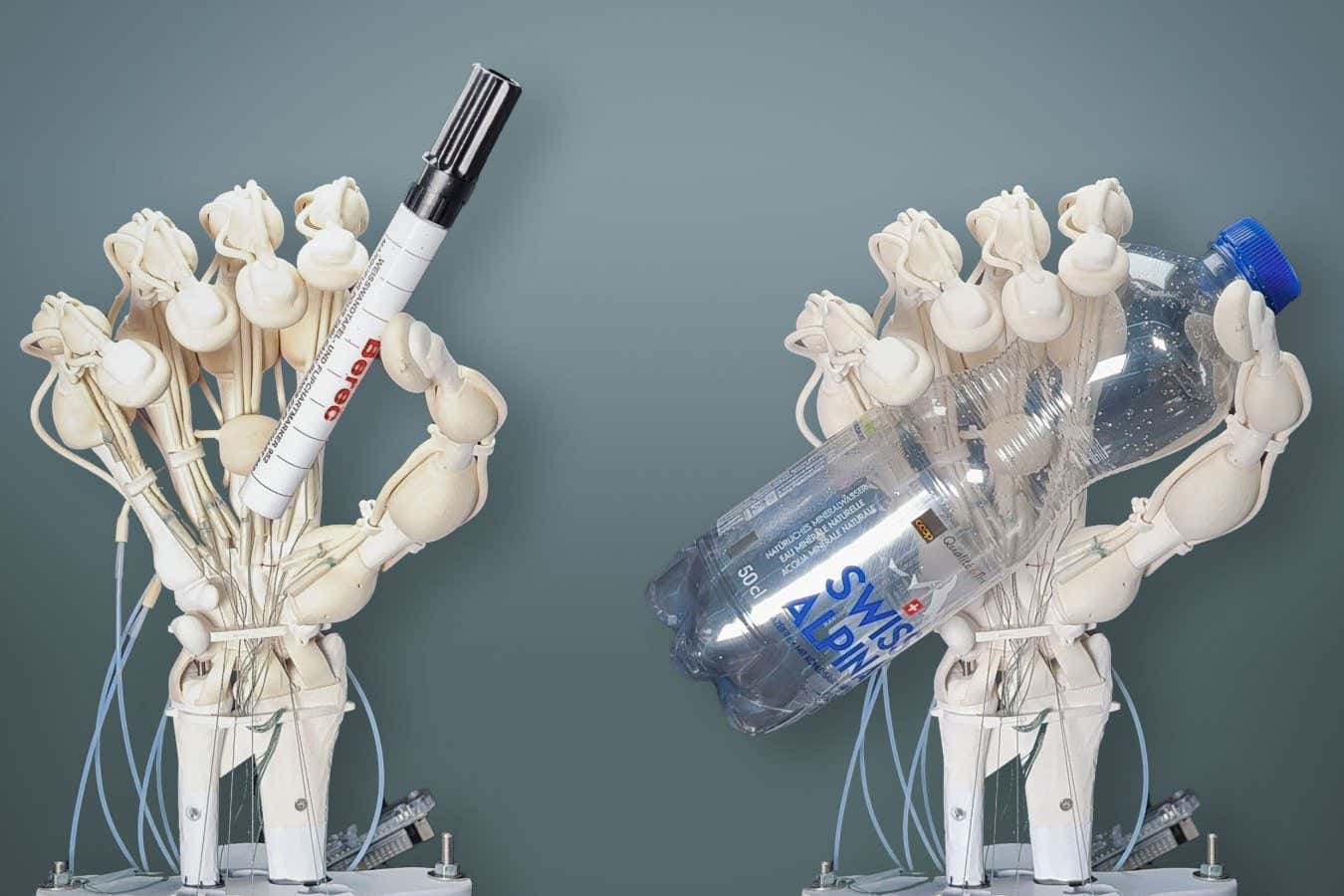
The researchers demonstrated this with two proof concepts. First, a spiral actuator that unfurls like a flower when pressurized. Second, a hand-like gripper with multiple segments that curl around objects when activated. Both were fully functional. Both were printed complete in a single job.
[IMAGE: Close-up technical diagram showing rotational nozzle system with multiple material channels]
The Material Science Behind Movement
The genius here is material-level thinking. You're not just using 3D printing as a manufacturing tool. You're using it as a way to spatially organize different materials so their properties create movement.
Polyurethane is strong and creates a boundary. Poloxamer is sacrificial—it exists only as a temporary scaffold. Once removed, you get voids. Those voids are where actuation happens. But the shape and orientation of those voids is precisely controlled because you programmed it during printing.
When you pressurize these hollow structures, physics takes over. The stiff outer walls constrain how the inner pressure can deform the structure. If you've printed the wall thickness thinner on one side of a tube than the other, the tube bends toward the thicker side. It's applied mechanics at the material design level.
The poloxamer removal process is actually non-trivial. You can't just use any solvent or temperature, because you'll destroy the polyurethane. But the Harvard team cracked this—they found conditions where poloxamer reliably dissolves and washes away without damaging the structure underneath. That process engineering matters as much as the printing innovation.

Speed and Precision: The Numbers That Matter
Let's get specific about what "faster" actually means here. A traditional soft robotic gripper—the kind you'd need for precision handling in a manufacturing environment—might take 5 to 7 days of fabrication time.
The Harvard printing method? Complete in 2 to 4 hours, depending on complexity. That's not just faster. That's a 20x to 35x compression of time, as noted in Eureka Magazine.
But here's the thing that's really significant: it's not just about speed. It's about repeatability. Traditional soft robotics fabrication has serious variability. Assembly by hand introduces inconsistencies. One gripper might perform slightly differently than another. That's a pain if you're trying to scale production or maintain quality.
With 3D printing, every instance of a design prints identically. The material deposition is controlled by software. That means a gripper printed today behaves the same as one printed six months from now. That's massive for manufacturing predictability.
The precision is also measurable. The rotational control of the nozzle can achieve positioning accuracy of about ±0.2 millimeters. That's fine enough that the actuators actually work reliably. You're not dealing with designs that "mostly" move. They move predictably within designed parameters.
Complexity That Wasn't Possible Before
Here's what gets me excited about this technique: it enables designs that were impractical to fabricate manually. You can now print structures with multiple actuators working in coordinated patterns, all integrated into a single component.
Imagine a robot arm segment where different regions can move independently. With traditional fabrication, that's separate pieces you'd have to connect. With rotational multi-material printing? That's all one integrated print. The wall thickness and chamber placement encode which segments bend and how much.
This means you can print a gripper where the thumb moves differently than the fingers. You can print a tentacle that undulates in a specific wave pattern. You can print structures with nested actuators—smaller movements nested within larger ones—all working together from a single print.
That kind of geometric complexity is actually hard to design for. You're thinking in 4D parameters: spatial coordinates plus the rotation encoding. But once you nail the design, the manufacturing is trivial. It's all software.
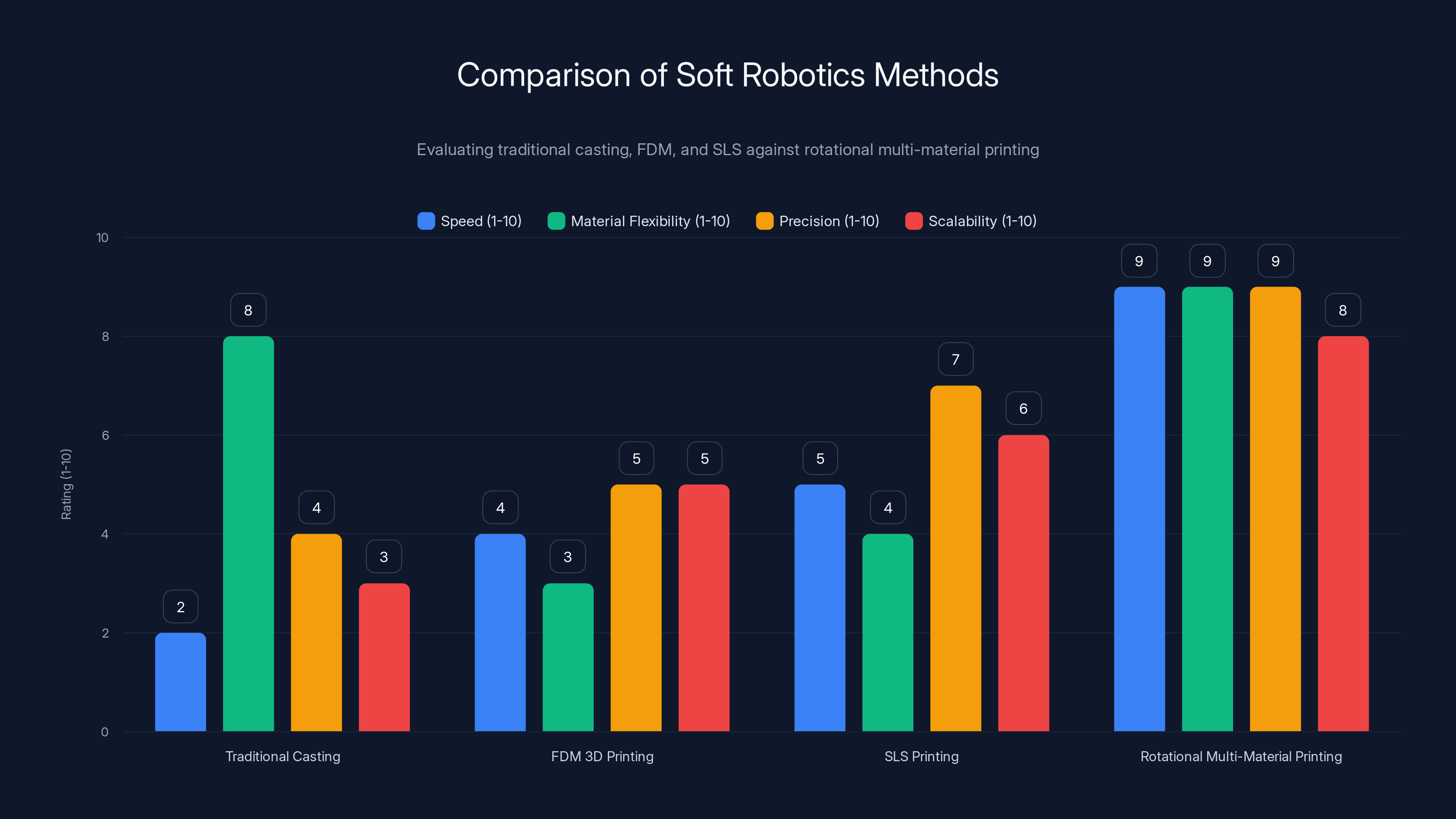
Rotational multi-material printing excels in speed, material flexibility, and precision compared to traditional casting, FDM, and SLS methods. Estimated data based on qualitative analysis.
Industrial Applications: Where This Gets Real
Okay, so what actually happens with this technology? Where does it matter?
Prosthetics and Biomedical Devices
This is probably the most immediate application. Prosthetics have traditionally been either rigid (good control, bad feel) or loose (comfortable, but limited function). Soft actuators change that.
You could print a prosthetic hand where each finger has individually calibrated actuation. The thumb has different stiffness than the pinky. The wrist can rotate with damping that mimics natural motion. All of this encoded into a single structure.
Here's what's really compelling: personalization becomes economical. Need a prosthetic for a specific person with specific hand size, grip strength, and use cases? You iterate the design, print a new one. No retooling. No expensive fabrication. This goes from weeks to days.
The materials can also be chosen for biocompatibility. You're not locked into industrial plastics. You can use polymers designed for skin contact or implant compatibility.
Underwater Robotics and Deep-Sea Exploration
The ocean is a brutal environment for robots. Salt water corrodes metal. Pressure crushes rigid structures. Traditional robots become expensive fast.
Soft robots, though? They're different. A flexible structure naturally distributes pressure. Soft polymers don't corrode the same way metals do. You could print an underwater vehicle designed specifically for extreme depths—something that looks more like a squid than a submersible.
The same printing technique would let you fabricate these complex oceanographic structures economically. A research vessel could literally 3D print its own specialized robotic manipulators for different expeditions. Fix a broken one? Print a new one.
There are already some early prototype applications here. Soft robots exploring hydrothermal vents, actuators designed to handle delicate samples without crushing them. This technology makes those designs practical at scale.
Manufacturing and Material Handling
This is where the technology starts to have immediate industrial ROI. Modern manufacturing plants use robots for everything from material transport to precision assembly. But rigid robots are often overkill. They're strong, but they're also dangerous and imprecise for delicate parts.
Soft grippers can handle fragile objects—textiles, ceramics, electronics—without damaging them. They can adapt to irregular shapes. They're safer to work around humans because they can't smash fingers with metal actuators.
Harvard's printing technique means a manufacturer can now print custom grippers for specific production tasks. Electronics factory needs a gripper for delicate circuit boards? Design and print one in a day. Textile facility needs a soft manipulator that won't damage fabric? Done. Ceramic producer needs something that can handle irregular shapes? Print it.
The economics shift. Instead of buying a general-purpose industrial gripper for
Search and Rescue Operations
Disaster scenarios are perfect for soft robotics. Collapsed buildings, rubble, confined spaces—traditional rigid robots get stuck or can't fit. Soft robots can squeeze through gaps, navigate obstacles, and retrieve objects without requiring a huge infrastructure.
This printing technique could let emergency response teams actually fabricate specialized search robots on-site. Design something for a specific rubble configuration, print it locally, deploy it immediately. You're not shipping standard equipment from a warehouse. You're building purpose-built tools for the specific disaster.
The iteration speed matters here too. First attempt doesn't work as expected? Print version 2.0 in a few hours. Refine based on field results. This would be unprecedented responsiveness in emergency robotics.
The Technical Challenges That Haven't Been Solved Yet
Here's where I need to be honest: this technology is real, but it's not production-ready for all applications yet.
Material Degradation and Lifespan
The polyurethane and poloxamer materials work well for proof-of-concept, but they're not engineered for extreme durability. Polyurethane degrades under UV exposure and extended thermal cycling. If you're printing grippers for outdoor use, you're looking at accelerated wear.
The research shows prototypes are stable for thousands of actuation cycles. But that's thousands, not hundreds of thousands. Industrial actuators need to operate for millions of cycles. We're not there yet.
There's also the question of chemical compatibility. Some manufacturing environments use oils, solvents, or aggressive cleaners. These can degrade the printed structures. The material science has to advance to handle those environments reliably.
Pressure Limits and Force Output
Soft actuators are inherently flexible, which means they're not perfect for high-force applications. The printed grippers demonstrate they can lift and manipulate objects, but we're talking gripping forces measured in newtons, not kilonewtons.
If you need an actuator that can exert 500 newtons of force, the geometry has to be significantly larger. The scaling laws of soft robotics aren't linear. Bigger structure doesn't necessarily mean proportionally more force—the compliance of the material becomes a limiting factor.
This matters for industrial applications. A manufacturing gripper needs to reliably handle heavy components. The current generation of 3D-printed soft actuators might not have the force bandwidth for all use cases.
Control and Sensor Integration
Right now, these actuators move based on pressure alone. You pressurize a chamber, it moves. But real robotic systems need feedback. They need to know if they're holding an object. They need to sense position and force. They need to adjust on the fly.
The Harvard technique prints the actuator structure, but the control systems are bolted on separately. Solenoid valves, pressure regulators, air compressors—that's external hardware. Real integration would embed pressure sensors, position sensors, and control logic into the printed structure itself.
Some early research is exploring this, but it's complicated. You can't easily 3D print sensitive electronics into soft structures without damaging components during the printing or wash-off process.
Scalability of Manufacturing
The Harvard lab printed small demonstrations. Scaling to industrial production introduces new problems. How do you batch-print hundreds of actuators? How do you automate the poloxamer removal process? How do you ensure quality when you're running 24/7 production?
Some of these are engineering challenges, not physics problems. But they matter. The difference between "this works in a lab" and "this works in a factory" is often a million dollars of engineering effort.
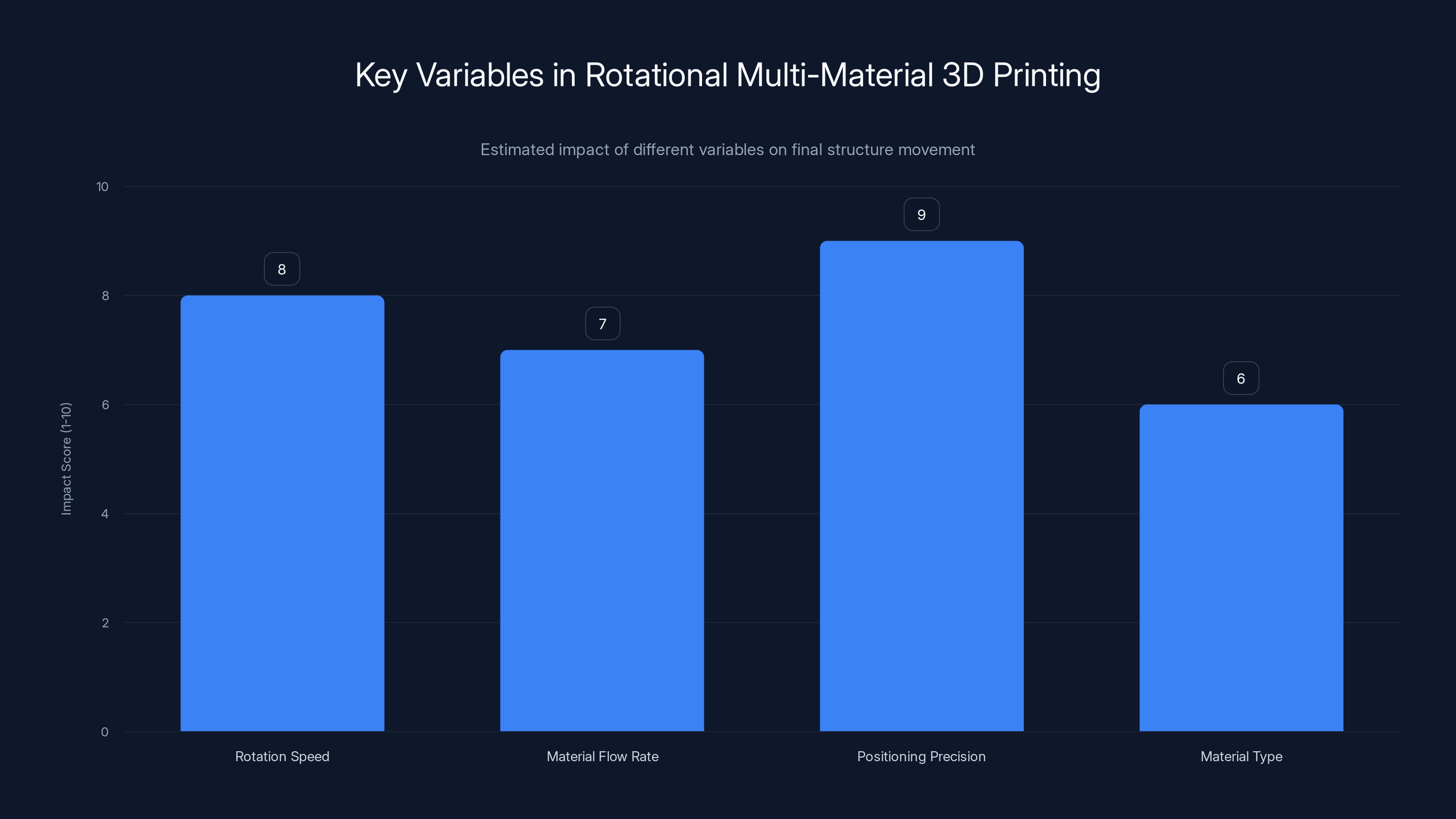
The rotation speed and positioning precision are crucial in determining the movement capabilities of the printed structure. Estimated data based on technical description.
The Safety and Ethical Concerns (The "Slightly Terrifying" Part)
Okay, let's address the elephant in the room. The coverage around this technology emphasized concerns about safety and control. Why?
The Speed Problem
Here's the thing about democratizing robot fabrication: it becomes easier to build robots for any purpose. That includes purposes nobody planned for.
If you can print a complex actuator in a few hours, the barrier to entry for building automated systems drops dramatically. A startup with basic 3D printing equipment could now fabricate soft robots that previously required specialized fabrication labs.
That's great for innovation. It's less great if there are minimal safety standards or oversight. A gripper designed poorly could malfunction in a workplace environment and injure someone. A soft actuator with calibration errors could behave unpredictably around humans.
The concern isn't that the technology itself is dangerous. It's that widespread accessibility plus minimal regulation could create situations where poorly-designed robots end up in human environments.
Failure Modes We Don't Fully Understand
When you print a structure with encoded movement logic, the failure modes are somewhat unpredictable. A traditional robot with separate actuators and control systems fails in understood ways: a motor dies, a sensor fails, a wire breaks. You can plan for those failures.
A 3D-printed actuator fails differently. Material degradation is gradual and non-uniform. Wall thickness variations can create stress concentrations. The poloxamer removal process might be incomplete in microscopic pockets, leading to unexpected stiffness or movement drift over time.
These failure modes aren't well-characterized yet. That means predictability is limited. In an industrial setting, unpredictable failure can cascade into safety incidents.
Programmability Without Oversight
Here's a subtly terrifying aspect: movement logic is encoded geometrically during printing. It's not software. You can't update it remotely. You can't add safety checks. You can't implement emergency stops in the digital layer.
If a design has a flaw—a gripper that grips too hard, or moves with unexpected force—the only fix is reprinting. You can't patch it. You can't hotfix it. You're reprinting hardware.
This is fine for simple, predictable applications. But imagine a soft robotic arm in a manufacturing environment where the encoded movement pattern has an edge case that causes it to jerk unpredictably. The only solution is: stop using that unit and print a new one.
In high-velocity manufacturing, that's a real constraint.
Job Displacement at Scale
This is less about the technology itself and more about the implications. If you can print functional robotic actuators economically, you can scale robotic labor dramatically. Not just in factories, but in warehouses, logistics, service industries.
The researchers acknowledged this. They noted that widespread adoption could "accelerate job losses" if not properly managed. That's the euphemistic way of saying "this technology could displace a lot of people."
The speed and simplicity are features from an engineering perspective. But they're also features that enable rapid automation of human jobs. That's a policy question, not a technical one, but it's real.

Comparison: How This Differs From Existing Soft Robotics Methods
To really understand the significance of rotational multi-material printing, it helps to compare it to existing approaches.
Traditional Casting and Assembly
Before 3D printing, soft robotics relied on casting individual components. You'd mold a chamber in silicone or polyurethane. You'd pour it, let it cure, remove it from the mold. Then you'd manually install pneumatic tubes, connect them to valves, and test the whole assembly.
Advantage: Complete creative freedom. You could design virtually any shape.
Disadvantage: Massively time-consuming. High labor cost. Difficult to scale. Inconsistent quality.
Rotational multi-material printing accelerates this by orders of magnitude while maintaining consistency.
FDM 3D Printing (Fused Deposition Modeling)
Standard FDM printers extrude plastic in linear paths. They can create rigid structures but struggle with truly soft, flexible geometry. You can print a design that looks like a soft robot, but it's often too stiff to be actually useful.
Some researchers have experimented with soft filaments in FDM printers, but the results are limited. You can't easily create the hollow chambers with precise wall thickness that Harvard's technique enables.
Advantage: Accessible. Many people have FDM printers.
Disadvantage: Limited material options. Inconsistent results. Can't achieve the geometric precision needed for reliable actuation.
SLS Printing (Selective Laser Sintering)
SLS uses a laser to fuse powered particles (usually nylon). It can create more complex geometries than FDM and achieves better precision.
But SLS has its own limitations for soft robotics. The materials available are typically thermoplastics that are stiffer than the soft polymers you really want for pneumatic actuators. You can print complex geometry, but the material properties don't match the application.
Advantage: Geometric complexity. Better precision than FDM.
Disadvantage: Material limitations. Post-processing requirements. Higher cost.
Rotational Multi-Material Printing (Harvard's Approach)
This technique combines the advantages of multiple existing methods while solving limitations of each.
Advantage: Material control (multiple materials in one print), geometric precision, speed, repeatability, integrated movement logic, scalability.
Disadvantage: Requires custom hardware. Not widely available. Still in research phase. Material durability questions.
| Method | Speed | Geometric Complexity | Material Choice | Consistency | Cost |
|---|---|---|---|---|---|
| Manual Casting | Very Slow | High | Good | Poor | Medium |
| FDM 3D Print | Fast | Medium | Limited | Fair | Low |
| SLS 3D Print | Medium | High | Limited | Good | High |
| Rotational Multi-Material | Very Fast | Very High | Excellent | Excellent | Medium |

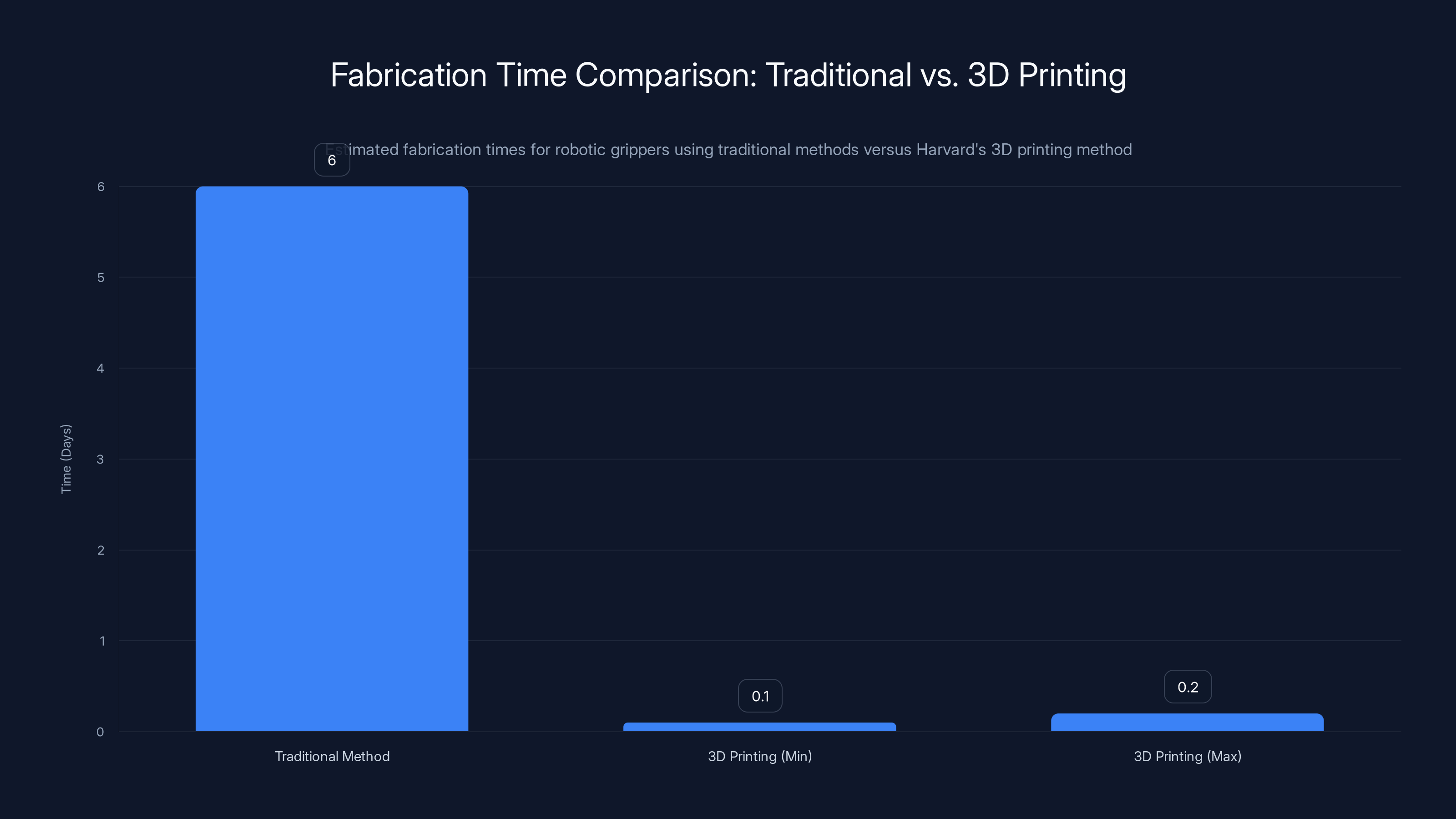
The Harvard 3D printing method significantly reduces fabrication time from 5-7 days to just 2-4 hours, representing a 20x to 35x time compression. Estimated data.
The Patent and Intellectual Property Landscape
The Harvard team filed a patent on this technology. That's significant because it shapes what happens next.
Patent protection means they've staked a claim. It also means they're interested in commercialization. Companies would need to license the patent or develop non-infringing alternatives to use this approach commercially.
Historically, this is how university research becomes commercial technology. A lab develops something promising, patents it, then either starts a company or licenses it to existing players. The patent gives them leverage to negotiate favorable terms.
But here's where it gets complicated: broad patents on novel manufacturing can either accelerate or stifle commercial development depending on how they're licensed. If Harvard aggressively enforces the patent and charges high licensing fees, it could slow adoption. If they license it permissively to multiple manufacturers, it could explode into a standard technique.
We're still in early stages of seeing how this plays out. The patent protection suggests this is a serious commercial effort, not just a research paper.
Competing Research Directions
Other groups are working on related technologies. There's research into multi-material 3D printing from other universities and private companies. Nobody else has published exactly this rotational technique, but the broader field of soft robotics fabrication is active.
That competitive pressure matters. It means the Harvard breakthrough might accelerate broader adoption, even if the specific patent isn't licensed widely. Competitors will develop alternative approaches that achieve similar results without infringing the patent.
That's normal in technology development. One breakthrough inspires a dozen competing approaches. Eventually, the best and most practical approaches dominate.

Future Research Directions
Here's where the field could go from here.
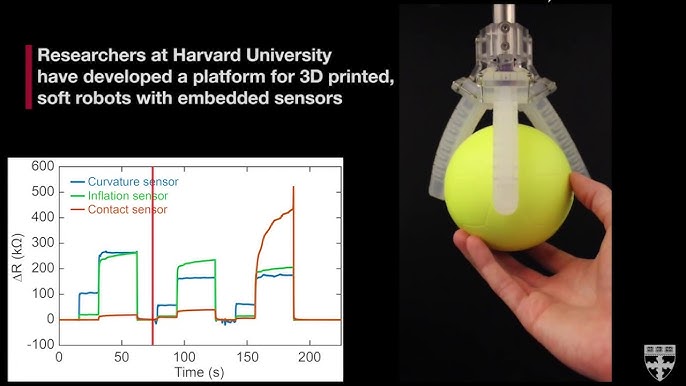
Embedded Sensors and Control
The natural next step is embedding sensing and control directly into printed structures. Imagine printing a gripper where pressure sensors are integrated into the material itself. Where the printed structure includes zones optimized for mechanical strength and zones optimized for sensing.
This is hard because sensors (cameras, pressure transducers, accelerometers) require electronics. Traditional electronics don't survive 3D printing processes or the chemical washes needed for support material removal.
But researchers are working on printed electronics—conductive inks that can be deposited alongside structural materials. If they crack this, you could print a fully self-contained, intelligent actuator. No bolted-on electronics. No external wiring. The intelligence is embedded.
Multi-Stage Actuation
Current demonstrations show single-stage movement: pressurize, structure moves. But what if you could print structures that respond to multiple pressure inputs in coordinated ways?
Imagine a gripper where different chambers respond to different pressure levels. Gentle pressure for light gripping, higher pressure for firm gripping, all from a single input. Or a tentacle where multiple pressure inputs create complex swimming motions.
This would require even more sophisticated material design and printing control. But theoretically, it's possible. You'd encode multiple movement patterns into a single structure.
Integration With Machine Learning
Control systems for soft robots are tricky because the dynamics are nonlinear and material-dependent. Exactly how much a structure bends depends on material properties, age, temperature, and current actuation history.
Machine learning could help. Train a neural network on the specific actuator's behavior. Let it learn the relationship between input pressure and actual movement. Then use that learned model for closed-loop control.
If you could print an actuator and automatically learn its control model in minutes, that would be transformative. You'd have truly personalized robotics: print something, learn its behavior, deploy it. Forty-five minutes from design to deployment.
Recycling and Sustainability
Here's an aspect nobody really talks about: what happens when the actuator wears out? Right now, you probably throw it away.
But polyurethane and poloxamer are both recyclable materials. The future might include systems for collecting used actuators, breaking them down, and recycling the material back into new actuators.
That would create a circular economy for printed robotics. Print an actuator, use it for 10,000 cycles, recycle it, print a new one. That scales sustainably in ways current manufacturing doesn't.

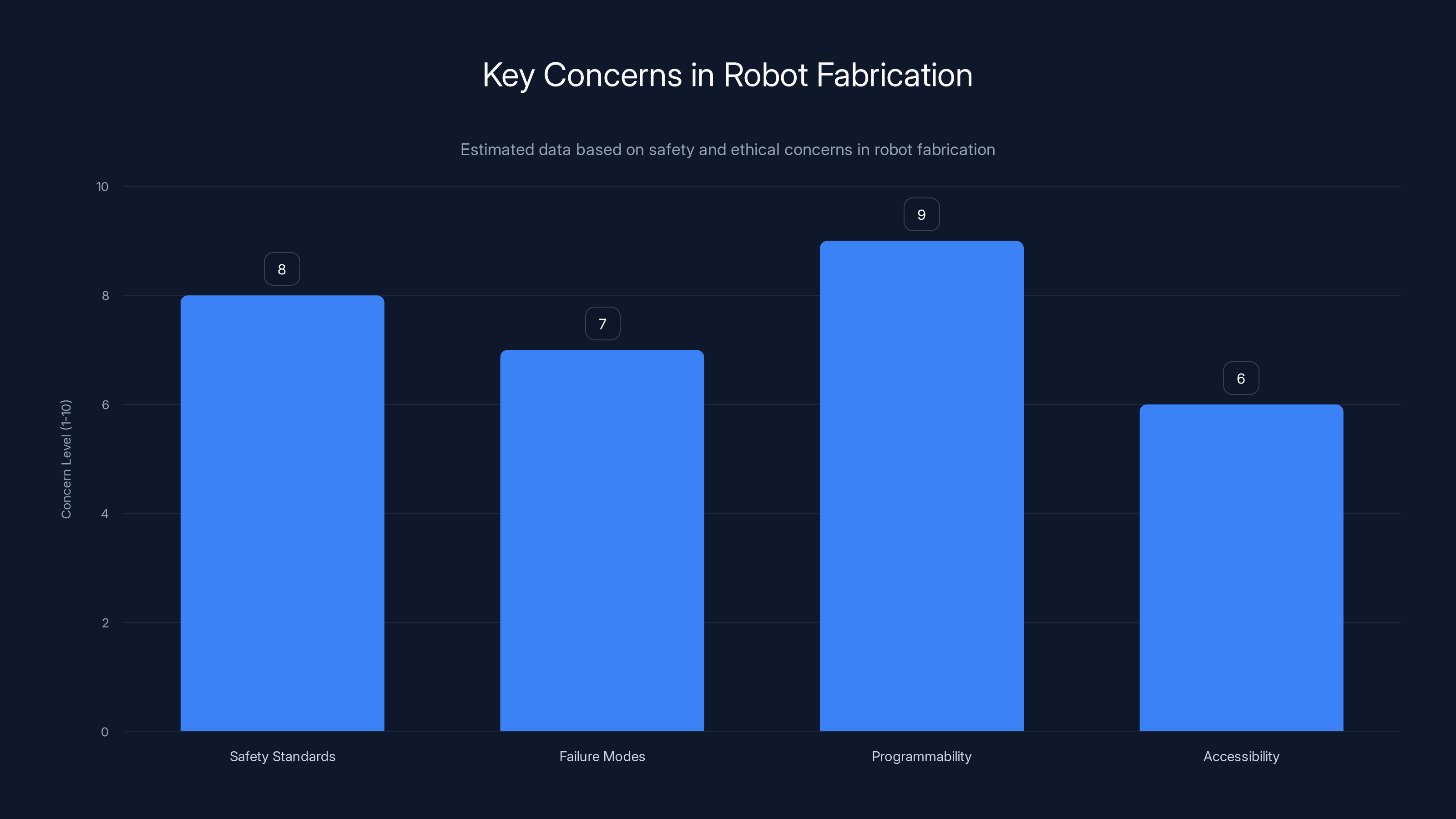
Estimated data suggests that programmability without oversight and lack of safety standards are the highest concerns in democratized robot fabrication.
Industry Adoption: When Does This Actually Matter?
Let's be realistic. This breakthrough happened in 2023-2024. It's exciting. But when does it actually show up in real products?
Usually, there's a lag. Fundamental research breakthrough → patent filing → licensing or startup formation → engineering development → commercial prototypes → early adopter sales → mainstream adoption.
That pipeline typically takes 3 to 5 years minimum. More realistically, 5 to 10 years.
But the early adopters will probably come from:
- Prosthetics manufacturers seeking next-generation designs and faster iteration
- Experimental robotics companies building specialized solutions
- Aerospace/defense contractors exploring new actuator options for specialized applications
- Research institutions using the technique to advance other fields
Mass-market applications (like soft grippers in every warehouse) are probably a decade away. But niche applications in specialized fields? Those could emerge in the next 2 to 3 years.
The Patent Expires Question
U. S. patents last 20 years from filing date. If Harvard filed in 2023-2024, the patent would expire around 2043-2044. That's a long time.
But here's what typically happens: technology moves so fast that by the time a patent expires, the technology has often already been superseded by better approaches. The patent might technically control the technique, but the market might have moved on to something more advanced.
That said, if rotational multi-material printing becomes a standard technique and nobody develops a better alternative, patent protection could remain valuable for decades.

Real-World Implementation Challenges
Let's get practical about what actually has to happen for this to move from the lab into real factories.
Regulatory Compliance
If you're printing robots that'll work in manufacturing environments near humans, you face regulatory requirements. Different countries have different standards for robotic safety. ISO standards, machine safety directives, liability frameworks.
A new manufacturing technique doesn't automatically meet these standards. Someone has to validate that 3D-printed soft actuators meet the same safety requirements as traditional actuators. That's testing, certification, potentially design modifications.
That process can take a year or more and cost millions. It's necessary, but it's not exciting, and it slows deployment.
Supply Chain and Materials
Right now, the technique uses polyurethane and poloxamer. Those are common materials, but they're not optimized for this specific process. As the technique scales, you'll probably see materials specifically engineered for rotational multi-material printing.
That means developing new material formulations, qualifying suppliers, establishing quality control processes. It's not hard, but it takes time and money.
Equipment Development
The Harvard lab uses custom equipment. For commercial deployment, you need printing systems that are:
- Reliable and durable (industrial-grade)
- Affordable enough to justify the investment
- Simple enough that manufacturers can operate them without Ph D-level expertise
- Standardized enough that designs can transfer between equipment from different suppliers
A startup or established manufacturing equipment company would need to commercialize printing hardware. That's significant engineering effort.
Integration With Existing Systems
Modern manufacturing plants have established workflows, equipment, and processes. Introducing a new actuator technology means integrating it with existing robot controllers, pneumatic systems, and safety infrastructure.
That's not particularly hard, but it requires validation and potentially custom integration work for each deployment. It's one more thing for manufacturers to worry about.
Comparison to Other Recent Soft Robotics Breakthroughs
Harvard's work isn't happening in isolation. The soft robotics field has seen several significant breakthroughs recently.
Other research has focused on:
- Shape-memory materials that remember shapes and can be actuated by temperature
- Origami-inspired structures that pack down and unfold for space efficiency
- Pneumatic artificial muscles using alternative material designs
- Soft exoskeletons for rehabilitation and augmentation
The Harvard breakthrough is specifically important because it attacks the manufacturing problem. Many other breakthroughs focus on materials or design. Harvard focused on production speed and scalability. That's the right problem to solve if you want real-world deployment.
Security and Dual-Use Concerns
Here's something the original coverage hinted at but didn't fully explore: dual-use risk.
Soft actuators are generally safe. But actuators combined with other technologies could create systems with unintended applications. A gripper designed for delicate material handling could potentially be weaponized or adapted for surveillance purposes.
The ease of fabrication makes this worry harder to address. Unlike traditional weapons manufacturing, which requires specialized equipment and expertise, soft robotics could theoretically be adapted by anyone with access to 3D printing.
That's not unique to Harvard's technique—it's true for soft robotics in general. But widespread adoption makes it more relevant. If every fab shop has the ability to print complex actuators easily, controlling applications becomes harder.
This isn't alarmism. It's a legitimate policy consideration. The scientific community should probably be thinking about responsible disclosure and controlled deployment of this technology.

The Bottom Line on Significance
Let me cut through the hype and be direct about what matters here.
Harvard's technique is genuinely significant because it solves a real bottleneck in soft robotics manufacturing. Soft robots are useful for real problems. The limiting factor has been how slowly you can build them. This technique removes that limitation.
That's the kind of breakthrough that typically leads to practical applications. It's not revolutionary in the sense of fundamentally changing physics. It's revolutionary in the sense of enabling something that was theoretically possible but practically impossible.
Those are the breakthroughs that actually matter. They're less flashy than discovering new particles, but they have real economic impact.
Will this change the world? Not immediately. Will it enable a new generation of robotic applications that weren't economically feasible before? Almost certainly. Will it require careful governance and oversight as it scales? Absolutely.
That's the realistic assessment. It's exciting without being overhyped. It's important without being apocalyptic.

FAQ
What exactly are 3D-printed robotic muscles?
3D-printed robotic muscles are actuators created using rotational multi-material 3D printing, where movement is encoded directly into the printed structure through precise material placement. Unlike traditional robots with bolted-on motors, these actuators are hollow structures filled with air or fluid that move according to how they were designed and printed. The polyurethane outer shell provides structural integrity, and the removal of interior gel leaves chambers that, when pressurized, create predictable bending, twisting, or gripping motions.
How does rotational multi-material 3D printing work?
The technique uses a continuously rotating nozzle that deposits multiple materials simultaneously as it prints. An outer layer of strong polyurethane is combined with an interior sacrificial gel called poloxamer. After printing, the gel is chemically washed away, leaving hollow tubes and chambers inside the structure. The rotation speed, material flow rate, and nozzle positioning all encode information about how the final structure will move. When pressurized, these hollow chambers deform in precisely designed ways, creating movement.
What are the main advantages over traditional soft robot fabrication?
Traditional soft robotics requires manually casting, hand-assembling, and testing individual components, a process that can take 5 to 7 days per gripper. Harvard's printing method completes complex actuators in 2 to 4 hours with superior consistency. The technique enables geometric complexity that's impractical to fabricate manually, allows precise control over wall thickness and chamber placement, creates fully integrated structures without assembly, and provides repeatability so identical units behave identically. This makes soft robots economically viable for industries that previously couldn't justify the fabrication cost.
What applications are realistic in the near term?
The most immediate applications are prosthetics and biomedical devices, where personalized, individually-calibrated actuators could be printed on-demand. Underwater robotics and deep-sea exploration are also viable, as soft structures handle extreme pressure better than rigid robots. Manufacturing and material handling represent strong commercial potential, particularly for delicate electronics, textiles, and ceramics handling. Search and rescue operations could benefit from on-site fabrication of specialized robots. These applications could see real deployment within 2 to 3 years as the technology matures.
What are the main limitations or challenges?
Current limitations include material degradation concerns—polyurethane and poloxamer aren't engineered for millions of actuation cycles or extreme environments. Force output is limited compared to rigid actuators; soft structures can't exert the same forces as mechanical systems. Sensors and control systems currently require external hardware rather than being embedded in the printed structure. Failure modes aren't fully characterized, creating unpredictability. Safety standards and regulatory compliance frameworks don't yet exist for 3D-printed soft robotics, requiring validation and certification before industrial deployment.
Why is this breakthrough considered "slightly terrifying"?
The ease and speed of fabrication raise concerns about oversight and control. With minimal barriers to entry, people could print functional robots for potentially harmful applications with limited oversight. Failure modes of printed structures aren't well-understood, creating safety risks in human environments. The movement logic is encoded geometrically and can't be remotely updated or patented like software. Most significantly, if widely adopted, this technology could accelerate automation and job displacement across manufacturing, warehousing, and logistics sectors with minimal time for workforce adjustment or policy response.
Is this technology available commercially now?
Not yet. The Harvard team holds a patent, and the technology remains primarily in the research phase. Early commercial development is likely in the next 1 to 2 years, starting with specialized applications like prosthetics. Broader manufacturing adoption probably requires 5 to 10 years for equipment commercialization, supply chain development, regulatory compliance, and market education. Early adopters will likely come from aerospace, defense, and specialized robotics sectors before mainstream manufacturing adoption.
How does this compare to other recent soft robotics advances?
While other breakthroughs have focused on materials (shape-memory polymers, origami structures) or designs (pneumatic artificial muscles), Harvard's innovation specifically addresses manufacturing speed and scalability. This is important because material and design innovations are only valuable if they can be produced economically. Harvard solved the production bottleneck, which means other innovations in soft robotics materials and designs can now be implemented practically. It's a foundational breakthrough that enables other advances.
What about sustainability and recycling?
Polyurethane and poloxamer are both recyclable materials, enabling future circular economy models for printed robotics. Currently, worn-out actuators are discarded. Future systems could collect used components, break them down, and recycle material back into new actuators. This would create sustainable scaling where actuators have predictable lifespans and material flows are managed environmentally. That said, recycling infrastructure doesn't yet exist and would need to be developed alongside commercialization.
Will this technology create new jobs or eliminate them?
Like most manufacturing innovations, the answer is mixed. On one hand, easier actuator fabrication could create jobs in robot design, customization, and specialized soft robotics applications. On the other hand, if widespread adoption enables dramatic automation of existing jobs faster than workers can retrain, it could displace workers in manufacturing, warehousing, and logistics. Policy response—including retraining programs, transition support, and strategic deployment—will determine the actual employment impact. The technology itself is neutral; its impact depends on how society chooses to implement it.

Conclusion: A Capability Inflection Point
What Harvard's engineering team created isn't just a better way to 3D print. It's a capability inflection point. We've crossed a threshold where something that was impractical is now practical. That matters because it shapes what gets built.
In the history of technology, these moments matter more than breakthrough discoveries. The first laser was interesting. But practical lasers that worked reliably changed everything. The first computer was a curiosity. Reliable, manufactureable computers changed the world. Harvard's technique is the first time soft robot manufacturing has moved from "this is possible in a lab" to "this could scale economically."
The implications are real. Prosthetics will improve. Manufacturing will change. New robots will do jobs humans don't want. Job displacement will accelerate. Safety concerns will emerge as technology deploys faster than regulation can keep up.
It's not apocalyptic. But it's not small either. This is the kind of progress that matters.
The "slightly terrifying" framing in the original coverage was accurate, not sensationalism. It's terrifying not because the robots are scary, but because speed of capability advancement is outpacing our governance structures and policy frameworks.
We don't have good answers yet for how to deploy transformative manufacturing technology responsibly. We're about to find out if we can figure that out while the capability is actively being commercialized.
That's the real story here. Not the robots. The governance challenge.
Harvard solved the manufacturing problem. Now society has to solve the deployment problem. Those are very different challenges, and we're running out of time.

Key Takeaways
- Rotational multi-material 3D printing compresses soft robot fabrication from 5-7 days to 2-4 hours by encoding movement logic directly into printed structures
- Technique enables geometric complexity impossible with manual fabrication while maintaining exceptional consistency and repeatability across identical units
- Immediate real-world applications in prosthetics, underwater robotics, manufacturing grippers, and search-and-rescue could deploy within 2-3 years
- Safety concerns, failure mode unpredictability, and lack of embedded sensing remain significant barriers to widespread industrial deployment
- Broader adoption raises valid concerns about job displacement and insufficient regulatory frameworks for rapid technology scaling
Related Articles
- Tungsten 3D Printing Breakthrough: What You Need to Know [2025]
- India's $1.1B State-Backed VC Fund: Deep-Tech Boom [2025]
- Segway Navimow's Strategy: Why Smart Lawn Mowers Skip Feature Bloat [2025]
- 3D-Printed Whistles: The Grassroots Defense Movement Taking Over America [2025]
- Biomimetic AI Robots: When Technology Crosses Into the Uncanny Valley [2025]
- Apeiron Labs Autonomous Underwater Robots: Ocean Intelligence Revolution [2025]

