
Introduction: The Humanoid Robot Factory Revolution
In February 2026, Toyota Motor Manufacturing Canada made a significant decision that signals a turning point in industrial automation: deploying seven humanoid robots built by Agility Robotics into its RAV4 manufacturing facility. This isn't a flashy technology demonstration or a laboratory proof-of-concept—it's a production-level commitment that represents real-world progress in robotics deployment at scale. After a year-long pilot program, Toyota determined that Digit humanoid robots could deliver measurable value in actual manufacturing environments, completing tasks that humans traditionally perform repeatedly throughout each shift.
The move reflects a fundamental shift in how enterprises approach automation. Unlike previous waves of robotics that relied heavily on specialized equipment and rigid production lines, humanoid robots offer a different value proposition: they can work in existing spaces, adapt to varied tasks, and potentially reduce the physical burden on human workers. For Toyota, the decision came after careful evaluation of multiple robotic platforms, suggesting that Digit met specific criteria around reliability, operational efficiency, and cost-effectiveness that other solutions couldn't match.
This deployment matters beyond Toyota's factory walls. It demonstrates that humanoid robotics has crossed from experimental phase into practical industrial application. Companies like GXO Logistics, Schaeffler, and Amazon have already integrated Digit robots into their operations, but Toyota's decision carries particular weight as a major automotive manufacturer. When an organization responsible for producing millions of vehicles annually commits to deploying humanoid robots, it signals confidence in the technology and typically accelerates industry-wide adoption.
The specific task assigned to these seven robots—unloading totes full of auto parts from automated warehouse tuggers—represents exactly the kind of repetitive, physically demanding work that manufacturers have struggled to automate efficiently. Traditional robotic arms require custom-built workstations and extensive programming. Humanoid robots, by contrast, can move through factory floors, interact with objects designed for human handling, and perform work in spaces that weren't specifically engineered for automation.
Yet this announcement also highlights the remaining challenges facing industrial robotics. While headlines often focus on breakthroughs in lab demonstrations, the real difficulty lies in deployment: integrating robots into existing workflows, managing charging cycles, performing maintenance, and optimizing for real-world variability. As industry experts emphasize, the gap between a working prototype and a functioning production asset remains substantial. Understanding Toyota's deployment decision requires examining not just what the robots do, but why companies are increasingly confident deploying them, what obstacles still exist, and how this trend will reshape manufacturing employment and operations globally.
Understanding Digit: Agility Robotics' Humanoid Platform
The Design Philosophy Behind Digit
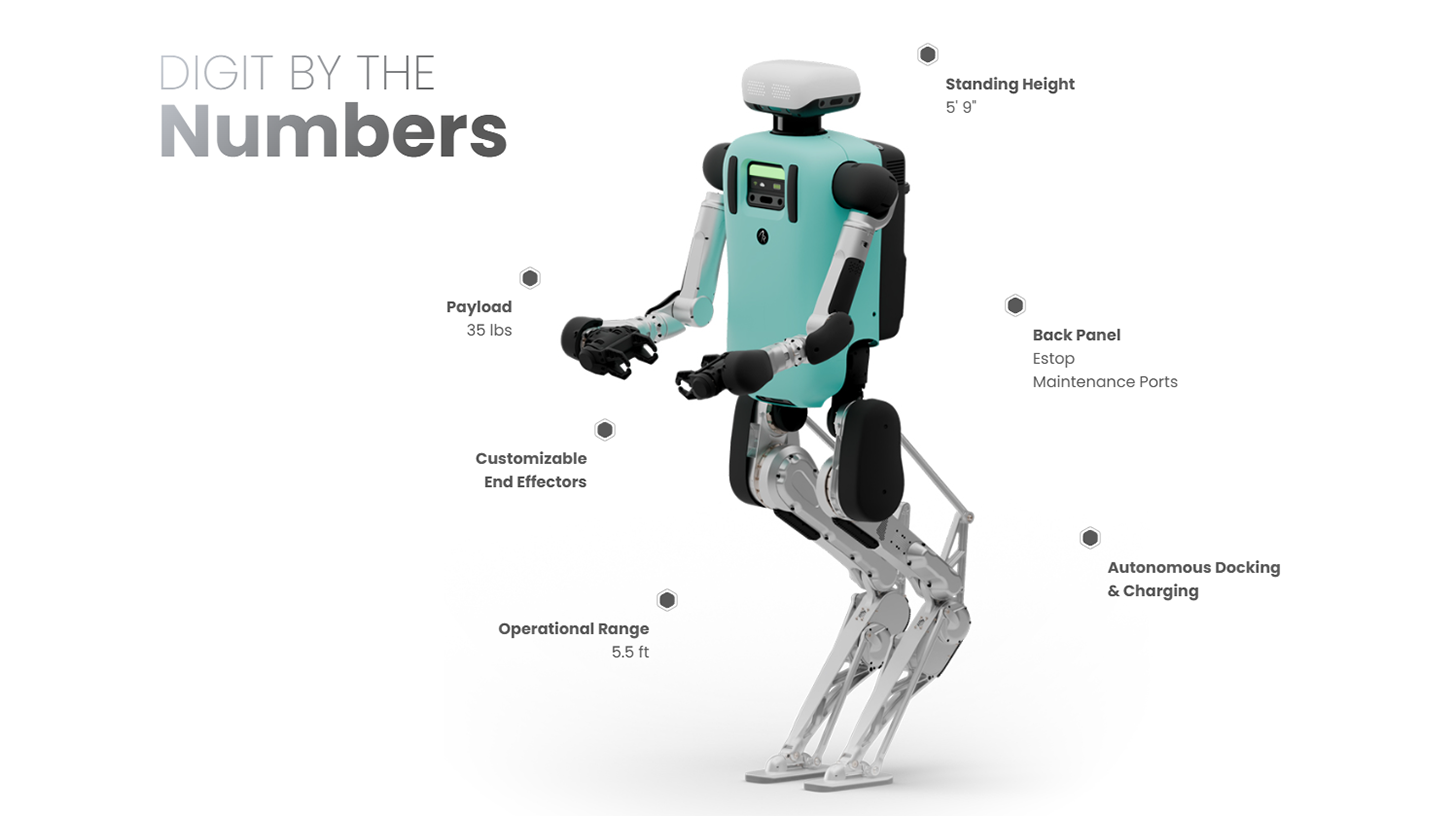
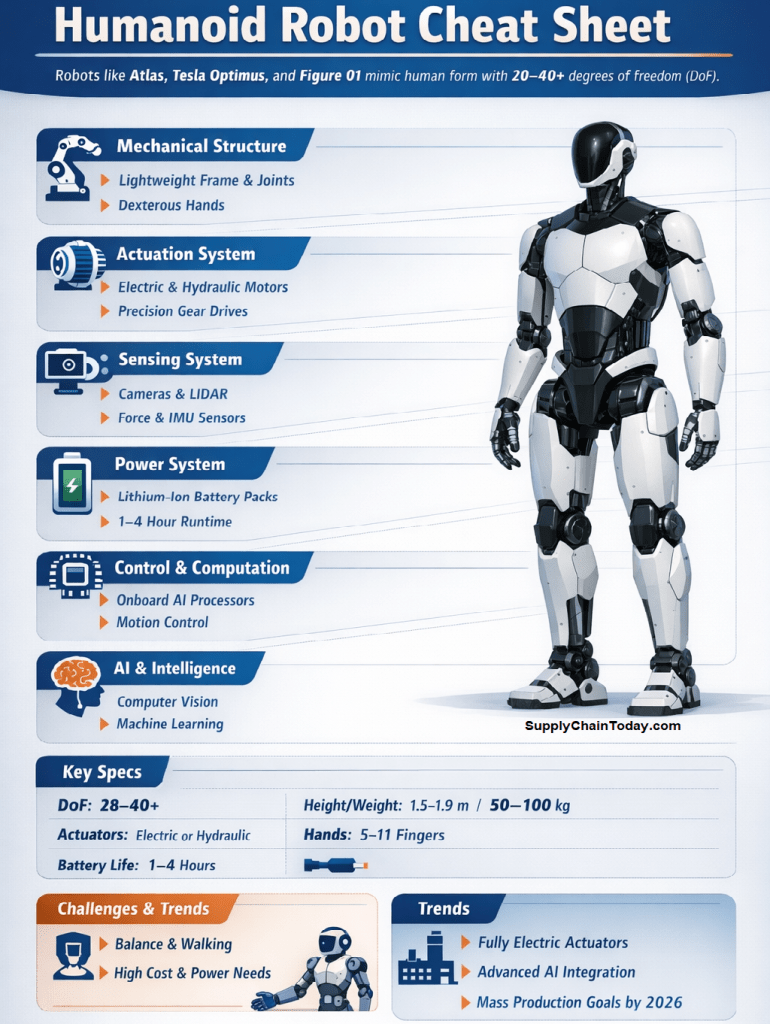
Digit represents a deliberate engineering choice to build a humanoid robot optimized for industrial environments rather than consumer applications or research. Agility Robotics, the Oregon State University spinoff founded in 2015, designed Digit with specific constraints and capabilities in mind. The robot stands approximately 5 feet 9 inches tall and weighs around 125 pounds, proportions chosen to navigate spaces designed for human workers without requiring facility modifications. This form factor addresses a fundamental limitation of many industrial robots: they're too specialized for general environments.
The humanoid design serves practical purposes beyond aesthetics. Human facilities—doorways, ramps, stairs, loading docks—accommodate Digit's proportions naturally. Unlike wheeled robots that struggle with stairs or robotic arms that require bolted mounting points, Digit can operate in existing manufacturing environments. The robot features articulated fingers capable of grasping objects with varying shapes and sizes, opposing thumbs that increase manipulation capabilities, and a mobile base that allows movement throughout factory floors without track damage or infrastructure modification.
Agility invested significant engineering effort into making Digit sturdy enough for industrial work while maintaining sufficient dexterity for varied tasks. The robot incorporates multiple redundancies in critical systems—multiple motors, backup electrical pathways, and distributed computing—ensuring that single component failures don't trigger complete shutdowns. This reliability focus directly addresses the deployment cost concerns that plague current robotics adoption. When a robot fails unexpectedly, the financial impact extends beyond repair costs to include production downtime, worker reassignment, and workflow disruptions.
Technical Capabilities and Specifications
Digit's technical specifications reflect engineering decisions optimized for manufacturing tasks rather than research demonstrations. The robot incorporates advanced sensors including RGBD cameras, force-sensing fingertips, and inertial measurement units that provide detailed information about the environment and the robot's interactions with objects. This sensor fusion enables Digit to perform complex manipulation tasks without explicit programming for each specific object configuration.
The mobility system emphasizes practical performance. Digit can travel at speeds up to 3.5 miles per hour—sufficient to keep pace with human workers moving through facilities—while maintaining stability on uneven surfaces common in factories. The robot's battery system, a critical consideration for continuous industrial operation, provides approximately 8 hours of operational time per charge. This duration aligns with typical shift lengths, allowing robots to work full shifts before returning to charging stations during breaks or shift changes.
Manipulation capabilities represent another key area of development. The robot's hands feature four fingers and an opposable thumb with sensing capabilities throughout. This design enables Digit to handle objects ranging from small components weighing ounces to heavy totes containing multiple pounds of parts. The force feedback systems allow precise manipulation—the robot can adjust grip pressure based on object properties, reducing damage to sensitive components while maintaining control of heavy loads.
Agility's Arc Platform: The Software Foundation
While the physical robot represents years of mechanical and electrical engineering, Agility developed Arc—a cloud-based software platform—to address the deployment challenge identified by industry experts. Traditional robot programming requires either custom coding for each task or teaching the robot through manual demonstration, both approaches consuming significant time and expertise. Arc abstracts these complexities through higher-level interfaces that non-specialists can use effectively.
Arc enables what Agility calls "generalist automation"—deploying the same robot platform across diverse tasks without extensive reprogramming. The software platform includes task libraries for common warehouse operations, manipulation sequences, and safety protocols. More significantly, Arc integrates artificial intelligence to optimize robot performance over time. As Digit robots complete tasks, the system learns variations in object placement, workflow timing, and environmental conditions, adjusting robot behavior to improve efficiency and reliability.
The platform also manages fleet-level operations—critical for organizations deploying multiple robots. Arc provides centralized monitoring, remote diagnostics, charging schedule optimization, and performance analytics. Organizations can identify bottlenecks in robot performance, predict maintenance needs before failures occur, and continuously improve task execution. This software layer transforms robots from isolated units into networked assets that improve through accumulated experience.

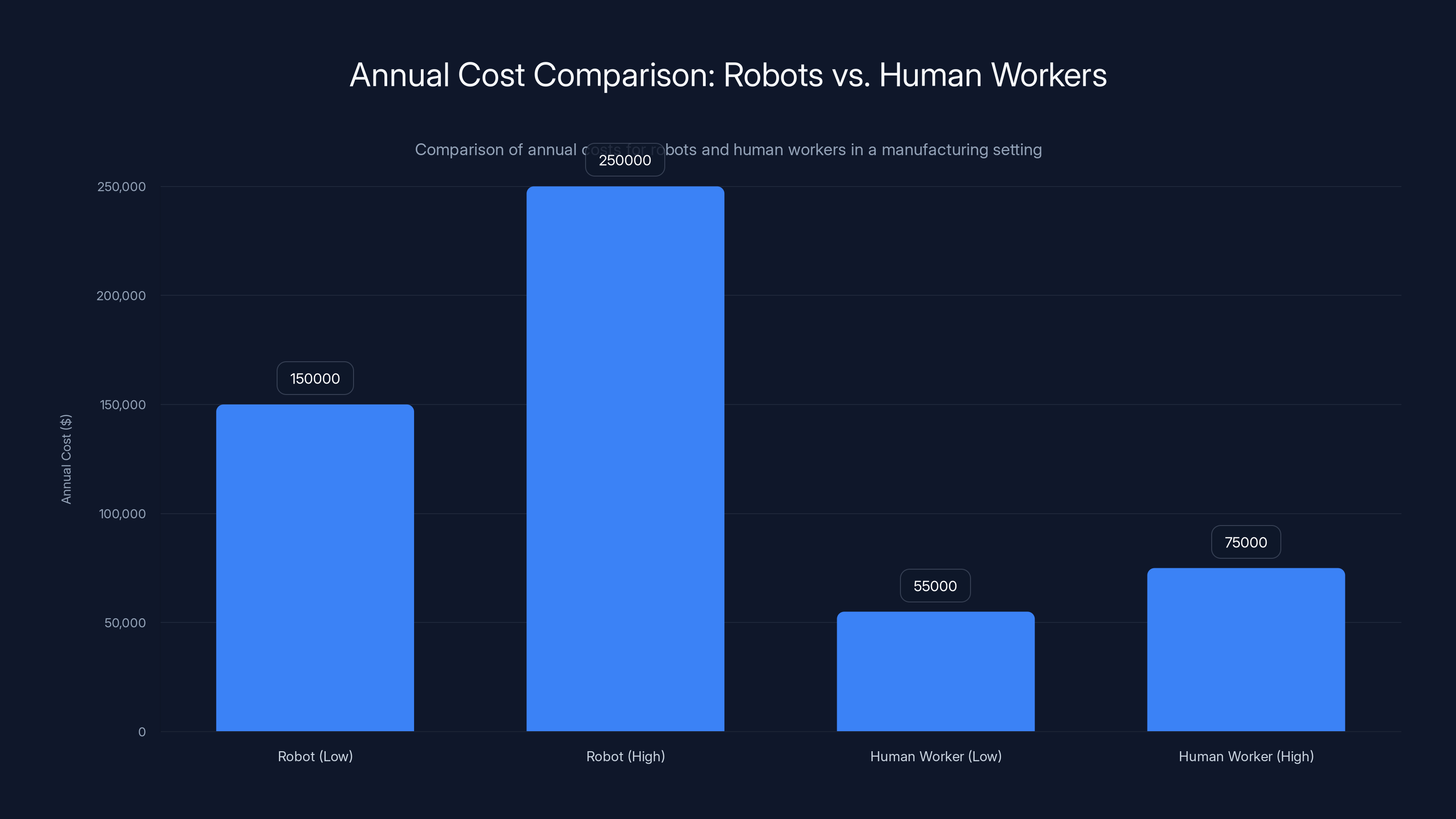
The annual cost of deploying a robot ranges from
The Toyota Manufacturing Canada Deployment: What Changed
From Pilot to Production Deployment
Toyota's announcement represents a transition from evaluation phase to commitment phase. The one-year pilot project provided Toyota's Canadian manufacturing operations team with empirical data on robot performance, maintenance requirements, workflow integration challenges, and cost-effectiveness. Rather than entering a limited pilot with one or two units, Toyota proceeded to deploy seven robots simultaneously—a significant expansion demonstrating confidence in the technology and integration approach.
The RAV4 manufacturing facility in Ontario where Digit robots were deployed produces one of the most popular SUV models globally, with annual production reaching hundreds of thousands of units. Selecting this high-volume facility for humanoid robot deployment signals that Toyota views the technology as ready for critical production lines rather than secondary or experimental applications. The factory represents a complex manufacturing environment: multiple production stages, high throughput requirements, integration with existing conveyor systems and material handling infrastructure, and strict quality standards. Digit performing reliably in this context provides validation for industrial deployment beyond Toyota's specific operations.
Tim Hollander, President of Toyota Motor Manufacturing Canada, emphasized that the decision followed systematic evaluation of multiple robotics solutions. This procurement approach—comparing Digit against competing platforms from Figure AI, Boston Dynamics, Tesla, and other emerging robotics companies—ensures that Toyota selected robots based on specific performance criteria rather than brand reputation or marketing momentum. The company operates manufacturing facilities worldwide and maintains rigorous standards for equipment selection, meaning Digit passed evaluation criteria that would disqualify less capable platforms.
The Specific Task: Warehouse Part Unloading
The assigned task—unloading totes filled with auto parts from automated warehouse tuggers—exemplifies work ideal for humanoid robots. These totes are containers with handles and consistent geometry, designed for human manipulation. Traditional robotic solutions for this task would require either a specialized gripper system mounted on a robotic arm, or a wheeled mobile robot with specialized end-effectors. Both approaches consume space and require task-specific engineering.
Digit, conversely, can grasp totes using its human-like hands, lift them (the robot can handle loads up to approximately 50 pounds), and place them in designated locations. The robot performs this task alongside human workers in the same physical space. The repetitive nature of warehouse work—each tote requires similar handling regardless of specific contents—makes the task ideal for automation. A human worker performing this task throughout a shift lifts, carries, and positions potentially thousands of pounds of material, creating fatigue and repetitive strain injury risks.
This application contrasts with typical robotic deployments that isolate robots behind barriers or in restricted zones. Digit robots at Toyota work in facilities where human workers remain present, requiring reliability and safety systems sufficient to prevent injuries. The robots must predict human movement, adjust their behavior accordingly, and communicate intent clearly through physical and potentially auditory signals. This coexistence requirement drove design decisions around speed, force limitations, and safety system redundancy.
Integration with Existing Warehouse Systems
The Toyota deployment required integrating Digit robots with existing automated warehouse systems—primarily the tugger vehicles that deliver totes to the unloading station. The tugger system operates independently, bringing totes to specific locations according to production schedules. Digit robots must coordinate with this system: recognizing when totes arrive, determining their position and orientation, retrieving them, and placing them in designated staging areas or directly feeding them into production lines.
This integration demanded Arc software configuration that connected Digit robots with Toyota's warehouse management system. The integration layer ensures that robots receive real-time information about incoming totes, priority items that require expedited processing, and operational changes that might affect workflow. Conversely, the warehouse system receives feedback from robots about completion status, any anomalies or damaged items, and performance metrics. This bidirectional communication transforms individual robots into integrated components of the material handling system rather than isolated units.
The coordination requirement also necessitated safety systems that prevent collisions and injuries. While Digit robots incorporate force-limiting technology that prevents dangerous acceleration, working in proximity to automated tuggers adds complexity. The system must ensure that robots maintain safe distances from moving vehicles, that tuggers can navigate around robots, and that safety protocols account for human workers, robots, and automated vehicles operating in the same space.

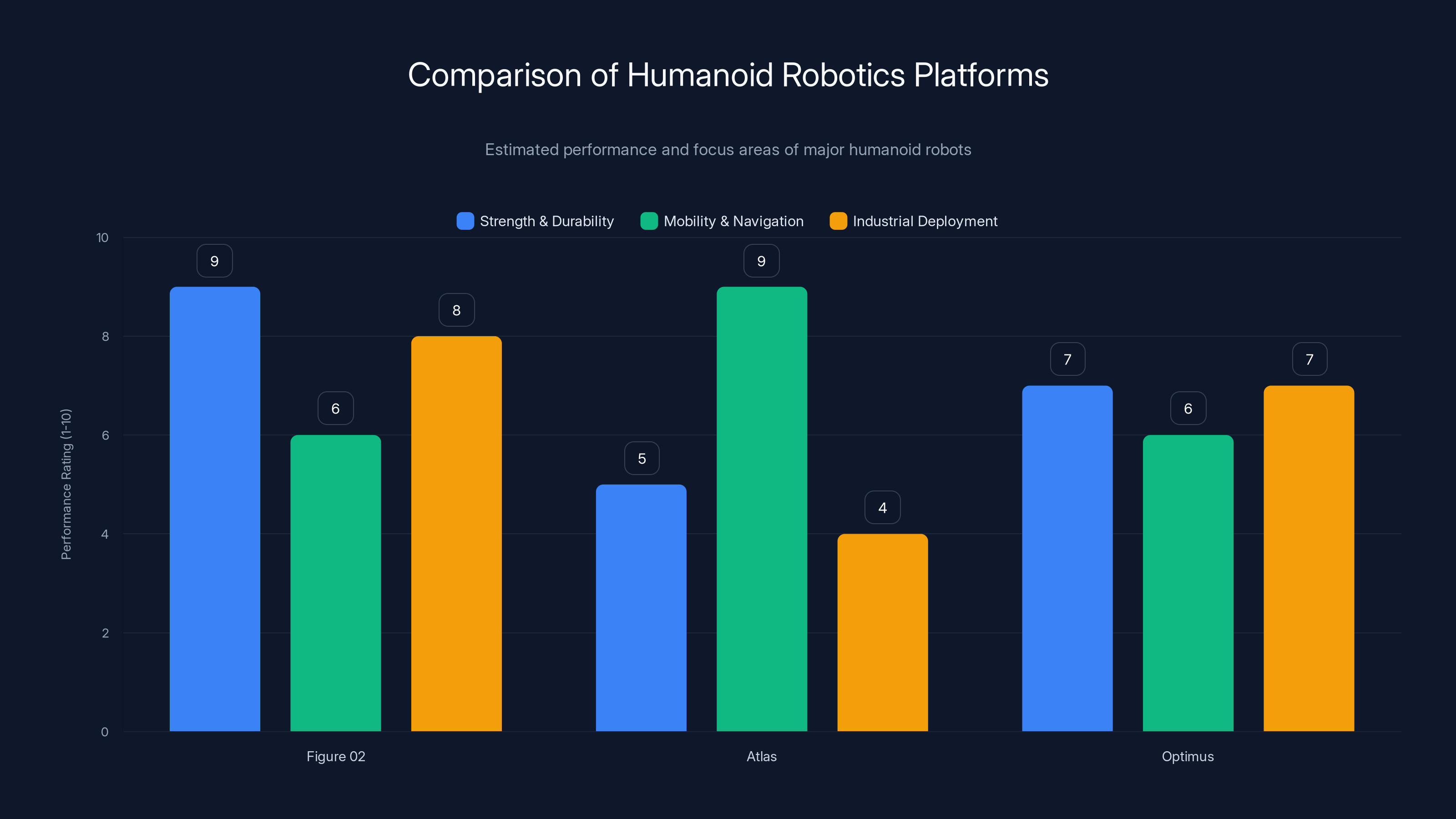
Figure 02 excels in strength and durability, while Atlas leads in mobility. Optimus shows balanced performance across categories. Estimated data based on reported capabilities.
The Industrial Robotics Market Context
Competitive Landscape in Humanoid Robotics
Toyota's selection of Digit humanoid robots occurred within an increasingly crowded marketplace of competing platforms. Several major technology companies and well-funded startups have announced humanoid robot development, leading some observers to question whether the market will support multiple platforms or consolidate around dominant designs. Understanding Toyota's choice requires examining competing approaches and how different platforms address the deployment challenge.
Figure AI, backed by significant venture capital funding and partnerships with major automakers, developed the Figure 02 humanoid robot with design philosophy emphasizing heavy lifting capability and industrial robustness. Figure conducted a ten-month pilot at BMW manufacturing facilities in 2025, demonstrating the capability to handle automotive assembly tasks. During that pilot, Figure robots reportedly processed approximately 90,000 components, providing detailed performance metrics under BMW's exacting manufacturing standards. Figure's design philosophy emphasizes strength and durability for heavy industrial applications, positioning the platform toward tasks requiring significant lifting capacity.
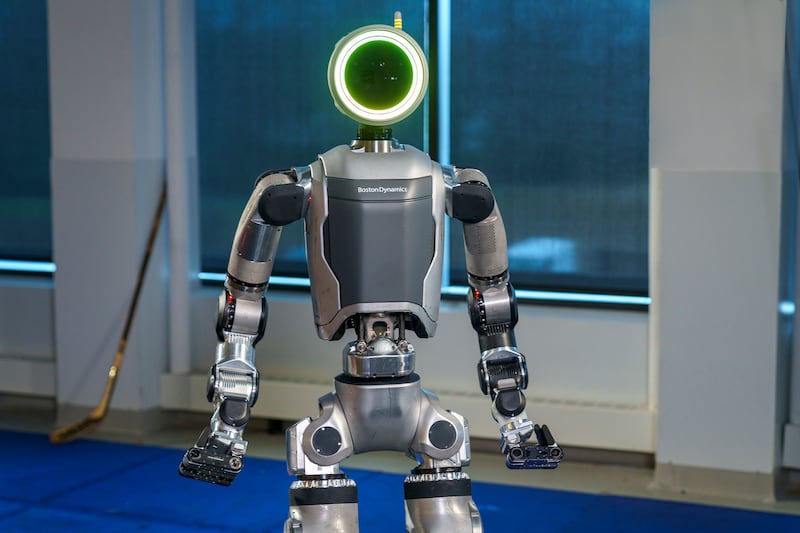
Boston Dynamics, backed by Hyundai, has developed Atlas—a humanoid robot emphasizing mobility and dynamic movement. Boston Dynamics' research focus historically concentrated on advanced locomotion and balance, leading to a robot platform that excels at navigation through complex terrain and maintaining stability in challenging environments. While Boston Dynamics hasn't deployed Atlas widely in manufacturing settings comparable to Toyota's commitment, the company's robotics expertise and Hyundai backing suggest potential for scaled deployments.
Tesla's humanoid robot, Optimus, represents the company's internal solution for automation needs. Tesla's engineering team designed Optimus specifically for manufacturing environments based on decades of automotive production experience. Tesla intends to deploy Optimus units within its own factories while potentially licensing or selling the technology to other manufacturers. The advantage of internally developed solutions lies in optimization for specific use cases and elimination of licensing dependencies.
Other companies including Apptrobotics, Unitree, 1X Technology, and Reflex Robotics have announced humanoid or advanced mobile manipulation platforms, though most remain in earlier deployment stages compared to Figure and Agility. This competitive landscape suggests that multiple platforms will likely coexist, with different robots occupying different market niches based on specific capability requirements.
Why Digit Won Toyota's Evaluation
The specific factors driving Toyota's selection of Digit remain partly proprietary, but industry analysis suggests several advantages that likely influenced the decision. First, Agility had demonstrated production-level reliability through prior deployments with logistics providers. GXO Logistics operates a large fleet of Digit robots for warehouse operations—these robots complete thousands of cycles daily across numerous facilities. This operational history provides empirical data about long-term reliability, maintenance requirements, and cost-of-ownership that exceeds what competing platforms had demonstrated at the time of Toyota's evaluation.
Second, the Arc software platform provided immediate value for fleet management and optimization. Toyota manufactures at enormous scale and operates multiple facilities worldwide. A robot platform with cloud-based fleet management capabilities allows the company to monitor and optimize performance across locations, share best practices and task configurations, and predict maintenance needs systematically. Competitors offering only the physical robot without sophisticated operational software require customers to develop these capabilities independently.
Third, Digit's form factor and design philosophy aligned well with Toyota's existing manufacturing environments. Unlike robots requiring special facilities or safety cages, Digit works in standard factory spaces. Toyota's facilities already included spaces suitable for Digit operation without modification or extensive safety system upgrades. This compatibility reduced deployment costs and integration complexity compared to solutions requiring facility modifications.
Fourth, the cost structure likely favored Digit. Agility operates Digit partially as a robots-as-a-service offering, where customers pay subscription fees rather than purchasing robots outright. This model aligns financial incentives—Agility benefits from robot reliability and long-term operational success—and reduces capital expenditure for Toyota. The model also includes maintenance, software updates, and Arc platform access in subscription pricing, providing cost predictability.
Manufacturing Automation Evolution: From Fixed Robotics to Flexible Humanoids
The Limitations of Traditional Industrial Robots
Factory automation has relied for decades on specialized robotic systems: articulated arms mounted on pedestals or overhead gantries, pick-and-place robots optimized for specific component types, and line-based systems requiring extensive integration engineering. These robots excel at high-speed, high-volume, repetitive tasks within carefully controlled environments. A robot arm can perform identical movements thousands of times daily with precision exceeding human capability. This capability made robotic arms foundational to modern automotive manufacturing.
However, these traditional robots face significant limitations for tasks requiring flexibility. Redeploying a robotic arm to a different task typically requires custom engineering: redesigning end-effectors (the grippers or tools at the robot's end), adjusting mounting systems, reprogramming movement sequences, and reconfiguring safety systems. This customization process consumes weeks or months and costs tens of thousands of dollars. For tasks performed less frequently or in locations where dedicated robotic infrastructure doesn't exist, the cost-benefit calculation often favors maintaining human workers despite lower efficiency.
Traditional robots also require extensive safety engineering. Modern industrial robots operate at high speeds with significant force, creating serious injury risks if humans contact moving components. Regulatory standards require physical barriers, safety switches, and interlocked systems ensuring that humans cannot access robot operating zones while the robot is active. These safety requirements mean that robots and workers operate in separate spaces, reducing flexibility for collaborative tasks.
Furthermore, traditional robotic systems provide little decision-making capability. A robot arm follows predetermined sequences of movements. If an object appears in an unexpected location, the robot typically stops or crashes rather than adapting. Variations in component placement, size, or orientation require either pre-planning to eliminate variations or expensive vision systems with sophisticated software to identify and classify objects before the robot can proceed.
The Humanoid Alternative: Flexibility Meets Capability
Humanoid robots address many traditional robot limitations through design philosophy emphasizing adaptability. Because humanoids function in human-designed spaces, existing infrastructure—doorways, work surfaces, storage systems—accommodates them without modification. This compatibility dramatically reduces integration costs and enables deploying robots in facilities never engineered with robotics in mind.
The human-like form factor provides another significant advantage: objects designed for human handling work with humanoid robots. Manufacturing facilities include countless tools, containers, and fixtures designed for human hands. A humanoid robot can use these items without modification. Conversely, deploying traditional robots in such environments typically requires custom tooling designed specifically for robotic grippers. This design compatibility extends deployment flexibility and reduces the need for specialized manufacturing infrastructure.
Humanoid robots incorporate sophisticated sensing and computational systems enabling adaptive behavior. Rather than following rigid predetermined sequences, humanoids can perceive their environment, identify variations, and adjust movement accordingly. Digit's force-sensing fingertips allow the robot to detect when an object is securely grasped and adjust grip pressure accordingly. Visual sensors enable the robot to recognize different tote orientations and grasp them appropriately rather than failing when encountering variations.
The computational systems in humanoid robots enable learning from experience. As robots perform tasks repeatedly, their systems accumulate data about successful and unsuccessful approaches. Machine learning algorithms trained on this data improve performance over time. A robot that initially required 30 seconds to grasp and retrieve a tote might optimize this process to 20 seconds through accumulated experience. This learning capability contrasts sharply with traditional industrial robots, which perform identically throughout their operational life unless explicitly reprogrammed.
Cost of Deployment: The Hidden Challenge
Pras Velagapudi, Agility's Chief Technology Officer, emphasized in industry discussions that deployment costs often exceed robot hardware costs—a statement that surprised many observers expecting robots to immediately generate cost savings. This reality reflects the true complexity of industrial automation: purchasing equipment represents only the beginning of implementation. Deployment costs include:
Integration Engineering: Connecting robots to existing systems, configuring software for specific tasks, and validating that robots function correctly within production environments. This process requires roboticists, software engineers, and manufacturing engineers collaborating across specialties. Organizations without in-house robotics expertise must contract external integrators, adding to costs.
Training and Safety Validation: Workers must understand how to interact safely with robots, respond to unusual situations, and maintain the equipment. Manufacturing safety regulations require comprehensive safety assessment before deploying new equipment. Organizations must verify that robots function safely in their specific environments with their specific workforce.
Workflow Optimization: Integrating robots into production requires analyzing existing workflows, identifying bottlenecks, and redesigning processes to accommodate robot capabilities and limitations. This optimization often reveals opportunities to improve overall efficiency, but requires project management and process engineering expertise.
Contingency and Maintenance Infrastructure: Manufacturing operations require redundancy and recovery plans. Organizations deploying robots must establish maintenance procedures, maintain spare parts inventory, train maintenance technicians, and develop contingency plans for robot failures. These requirements add ongoing operational costs.
Agility's emphasis on AI-driven optimization through Arc specifically targets reducing deployment costs. By automating much of the integration engineering through software templates, pre-built task libraries, and machine learning-based optimization, Arc reduces the expertise and time required for deployment. This software-centric approach enables organizations to deploy robots faster and with less integration expense, improving the cost-benefit calculation for robot adoption.
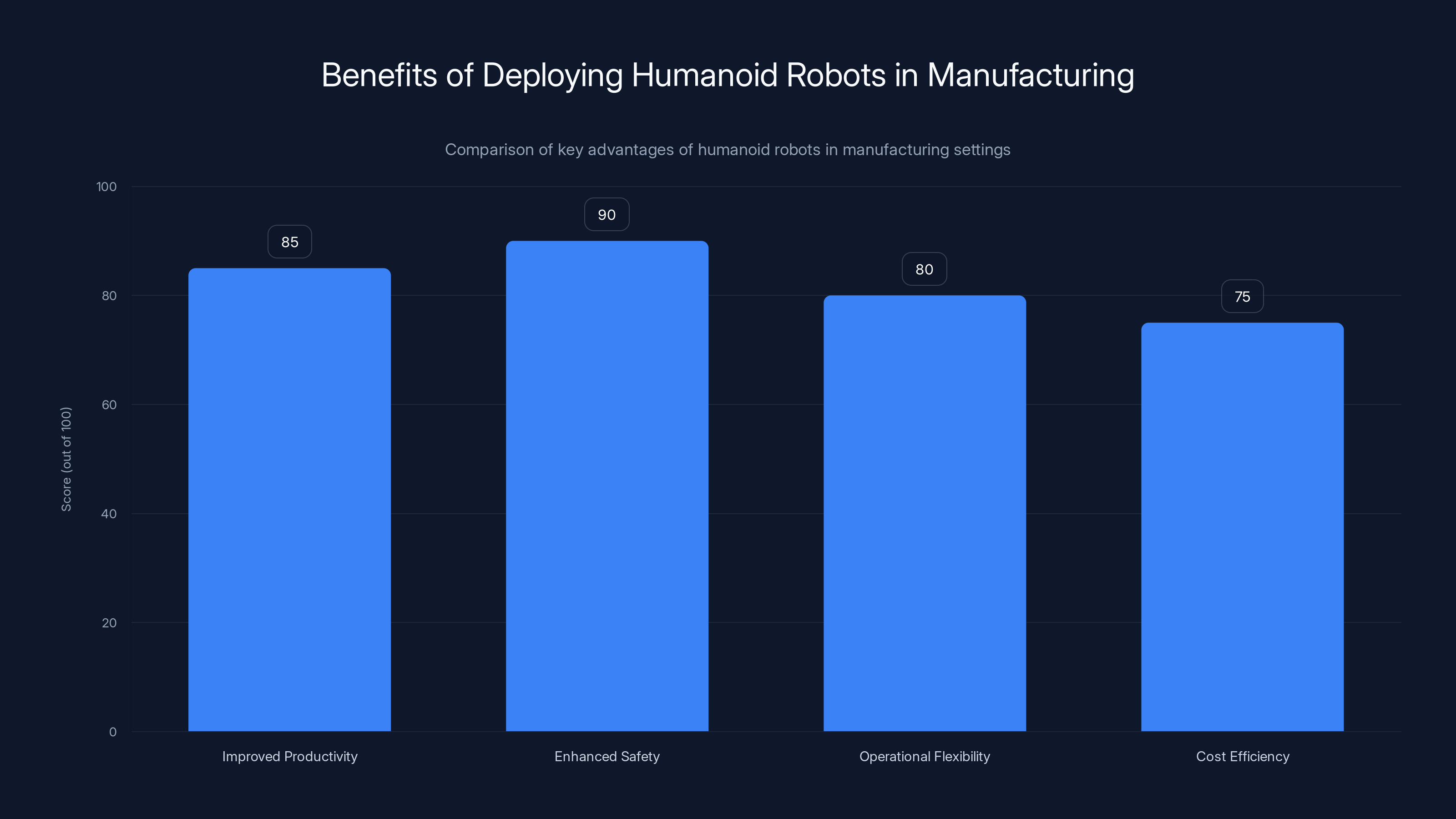
Humanoid robots offer significant benefits in manufacturing, with enhanced safety and improved productivity being the most notable. Estimated data.
Safety and Human-Robot Collaboration
Designing for Safe Coexistence
Toyota's deployment occurs in environments where human workers and robots share the same spaces—a requirement that fundamentally shapes robot design and safety considerations. Unlike traditional industrial robots operating behind barriers, Digit must prevent injuries to human workers through multiple overlapping safety systems rather than relying on physical isolation.
Force-limiting technology represents the primary safety mechanism. Digit's joints incorporate compliance—the robot yields when encountering unexpected resistance rather than applying unlimited force. This capability prevents injuries if a robot contacts a human worker: the robot stops moving and retracts rather than crushing or pinning the person. The force limits are calibrated to safety standards ensuring that even direct contact cannot cause severe injury.
Movement speed and acceleration constraints provide secondary safety layers. Robots operating in human-proximate environments typically move slowly enough that human workers can respond to avoid collisions. Digit's operational speed in warehouse environments remains well below maximum physical capability, prioritizing safety over speed. Acceleration limits prevent sudden movements that might cause startle reactions or make avoidance difficult.
Perceptual systems enable robots to detect human workers and adjust behavior accordingly. Digit incorporates multiple sensors providing environmental awareness. If a person enters the robot's operating zone, the system can detect this and either pause operations or redirect the robot's movement to maintain safe distances. Some deployments include wearable proximity sensors worn by human workers, providing additional data about worker locations and enabling more sophisticated avoidance behaviors.
Regulatory and Operational Safety Considerations
Industrial robotics operates within comprehensive regulatory frameworks designed to prevent injuries. International standards including ISO 10218 establish requirements for robot safety, addressing mechanical design, electrical systems, control systems, and environmental integration. These standards require detailed risk assessment, hazard analysis, and validation before industrial robot deployment.
Toyota's deployment in Canadian manufacturing must comply with Canadian Labour Code requirements for workplace safety. These regulations address not just the robots themselves but the complete systems: facility design, worker training, operational procedures, and emergency response protocols. Regulatory compliance represents significant portions of deployment costs and timeline, but provides crucial protection for workers.
Operational protocols likely include procedures for human workers to communicate with robots and safely manage situations where robots malfunction. Workers must understand how to safely disengage robots from power, how to move robots manually if necessary, and how to respond to safety system activations. These procedures require comprehensive training and documentation.
Maintenance procedures also incorporate safety considerations. Servicing robots requires technicians to work in close proximity with equipment containing moving parts and stored energy. Comprehensive lockout/tagout procedures, equivalent to those used for other industrial equipment, prevent accidental activation during maintenance. Organizations deploying robots must maintain this safety discipline throughout the equipment lifecycle.
Evolution Toward Greater Autonomy
Agility has announced development of next-generation humanoid robots explicitly designed to operate safely around human workers with greater autonomy. Current humanoid robots, while capable of impressive performances, incorporate limitations ensuring they cannot cause serious injuries even through unexpected failures. Future generations aim to reduce these limitations through enhanced perception, more sophisticated motion planning, and learning systems that enable safer operation at higher speeds and with greater force.
This evolution parallels development in autonomous vehicles—as perception and control systems improve, systems can operate more autonomously while maintaining or improving safety. The development timeline suggests that widely applicable human-robot collaboration at production speeds remains several years away, but the trajectory is clear. As robots become safer through technological advancement, organizations can increase task complexity and reduce safety-related constraints on robot performance.
Global Manufacturing Trends: Automation, Employment, and Competitiveness
The Automation Imperative in Global Manufacturing
Toyota's decision to deploy humanoid robots reflects broader trends in global manufacturing economics. Labor costs in developed economies continue rising, making automation increasingly cost-effective. Conversely, manufacturing quality standards and complexity have increased, making automation valuable not just for cost reduction but for consistency and precision. Modern vehicles incorporate thousands of components and hundreds of control systems—maintaining quality at the volumes that automotive manufacturing requires relies heavily on automation.
Global supply chain dynamics also drive automation adoption. Manufacturing in developed economies faces competitive pressure from lower-cost regions. Automation increases productivity and enables domestic manufacturing to compete economically despite higher labor costs. For countries like Canada with strong manufacturing heritage but elevated labor costs, automation becomes essential for industrial competitiveness.
The skilled labor shortage in manufacturing adds urgency to automation adoption. Many manufacturing workers in developed economies approach retirement, and younger workers increasingly prefer service sector or knowledge work employment. Manufacturing organizations struggle to recruit and retain workers for repetitive, physically demanding tasks. Automation becomes not just an economic choice but a requirement for maintaining productive capacity.
Additionally, workplace safety considerations create imperative for automation. Repetitive tasks like warehouse part unloading produce occupational injuries including repetitive strain syndrome, back injuries, and muscle damage. Companies face growing pressure from workers, regulators, and public opinion to eliminate hazardous work. Automating dangerous repetitive tasks aligns economic and safety objectives.
Regional Variations in Automation Strategy
Different regions adopt automation at different rates based on labor costs, regulatory environments, and technological capability. North America and Western Europe, with high labor costs and strong robotics industries, adopt industrial robots most extensively. Asian manufacturing in lower-wage regions relies more heavily on human labor, though automation is increasing as labor costs rise and technological capability improves.
Canada specifically has positioned itself as a high-value manufacturing hub rather than competing on labor cost alone. Canadian government policies encourage advanced manufacturing, supporting companies in automation adoption and technology development. Toyota's Canadian operations represent significant economic activity, with the company investing substantially in Canadian facilities. Deploying advanced humanoid robots in Canadian operations aligns with government initiatives promoting high-tech manufacturing and maintaining manufacturing competitiveness.
China presents an interesting case: despite lower labor costs, Chinese manufacturing increasingly adopts automation. Government policies encourage industrial modernization and technological advancement. Companies competing globally cannot accept merely lower costs—they must compete on capability, quality, and responsiveness. Automation enables these competitive advantages. As Chinese labor costs rise and workers transition to service sector employment, automation adoption accelerates.
Employment Implications and the Future of Manufacturing Work
The deployment of humanoid robots inevitably raises questions about employment impacts. The conventional analysis suggests automation reduces employment in routine manufacturing tasks while creating demand for higher-skilled workers in equipment operation, maintenance, programming, and process optimization. This theoretical framework describes some real labor market dynamics but oversimplifies complex employment situations.
Historically, major technological innovations in manufacturing—numerical control machines, computerized systems, industrial robots—did reduce employment in specific task categories. However, total manufacturing employment remained relatively stable through most of the late twentieth century, as employment gains in new areas offset losses in automated work. The employment challenge emerged when automation coincided with outsourcing, where manufacturing shifted to lower-wage regions rather than upgrading existing facilities.
Currently, humanoid robots enable manufacturing in high-cost regions that would otherwise relocate offshore. A facility deploying humanoid robots in Canada might maintain employment for facility managers, robot operators, maintenance technicians, quality inspectors, and logistics coordinators—roles that require local presence. Without automation, the facility might relocate entirely, eliminating all manufacturing employment at that location.
However, the nature of manufacturing work transforms. Traditional manufacturing employment emphasized routine task repetition with extensive hiring from general populations. Future manufacturing employment emphasizes technical capability, continuous learning, and adaptation to changing technology. This transformation requires educational investment and workforce development. Organizations like Toyota can facilitate this transition through training programs and employment stability, but the required adjustments remain substantial for many workers.
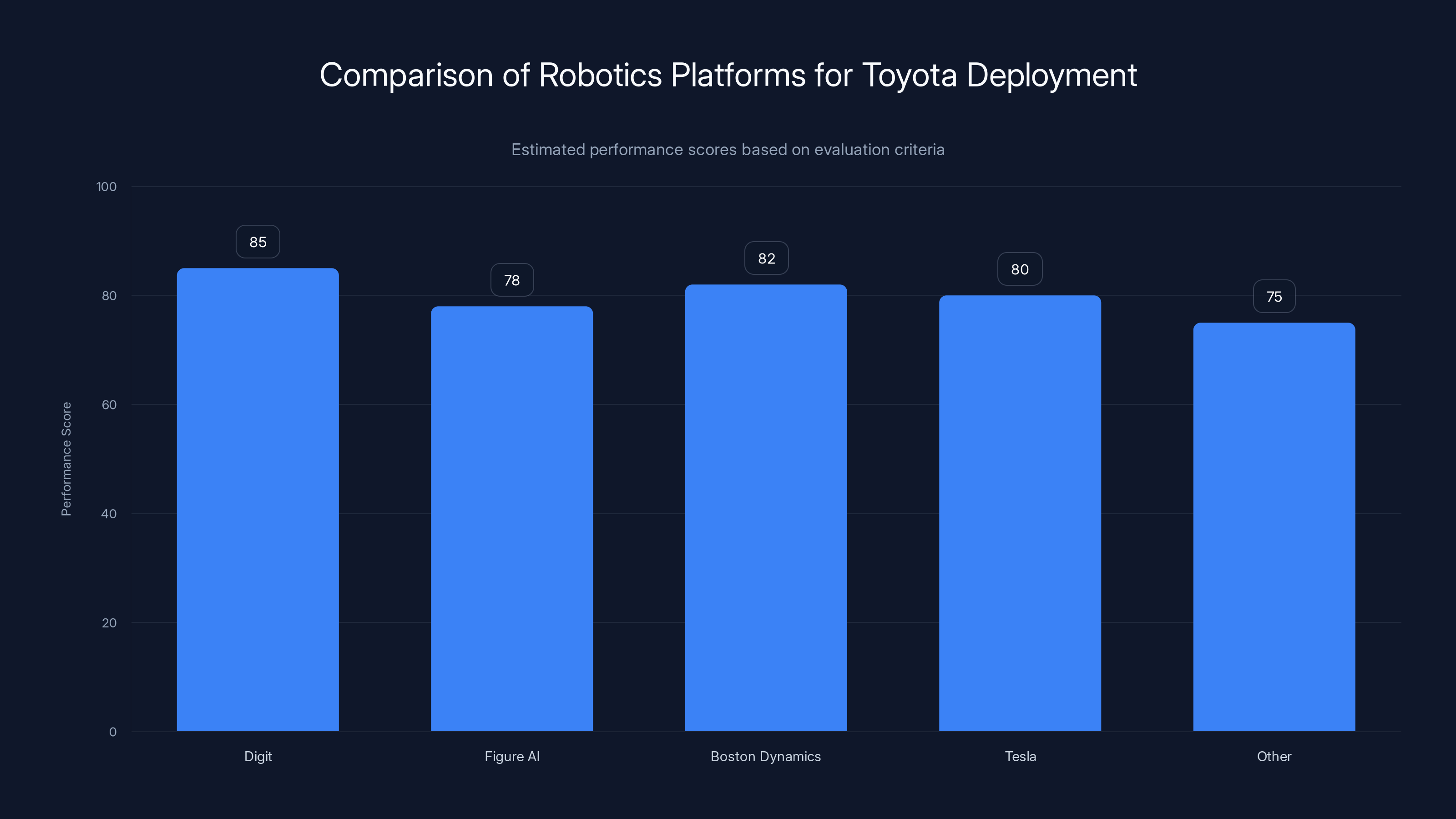
Toyota selected Digit for its Canadian manufacturing deployment after evaluating multiple robotics platforms. Digit scored highest on performance criteria. Estimated data.
Economic Analysis: Costs, Benefits, and ROI
Capital and Operating Cost Structure
Understanding the economic justification for humanoid robot deployment requires analyzing both capital and operating costs. Digit robots reportedly cost approximately
For comparison, a manufacturing worker in a Canadian automotive facility earns approximately
However, the economic analysis extends beyond direct labor cost comparison. Manufacturing facility operators consider:
Productivity Improvement: Robots working continuously during shifts without breaks, fatigue, or variation in performance can complete more cycles than human workers. If a human worker completes 50 tote unloads per hour with variation in cycle time, a robot might complete 60 cycles with consistent timing. Over 16-hour facility operations and accounting for maintenance downtime, this productivity difference accumulates substantially.
Quality Consistency: Human workers performing repetitive tasks unavoidably vary in performance—some cycles fast, some slow, some involving accidental damage to components. Robots perform identically throughout operational time, potentially reducing damage and improving quality metrics.
Overtime Elimination: Manufacturing facilities operating to tight production schedules often require worker overtime. Robots continue operating without overtime cost implications. This becomes particularly valuable when production demand spikes.
Safety and Regulatory Costs: Reducing occupational injuries decreases workers' compensation insurance costs, reduces regulatory compliance burdens, and improves workplace morale. These financial benefits don't appear obviously in simple cost-benefit analysis but contribute substantially to total economic value.
Facility Flexibility: Unlike specialized robots requiring dedicated infrastructure, humanoid robots can relocate to different tasks as production needs evolve. This flexibility provides value when production volumes shift or product mixes change.
Realistic ROI Timeframes
Realistically, humanoid robots at current cost levels and capability show positive ROI within 3-5 years for appropriate applications. In Toyota's warehouse unloading application—continuous routine work with clear standardization—ROI likely skews toward the faster end of this range. In less structured tasks with greater variability, ROI timelines extend proportionally.
The seven robots deployed by Toyota represent capital and operational investment of approximately
Further, the robots represent a learning investment for Toyota. The seven units generate operational data, workforce experience, and process optimization knowledge that Toyota can apply in deploying robots at other facilities. If the Canadian deployment succeeds, Toyota likely plans larger rollouts at other locations, with each subsequent deployment benefiting from accumulated knowledge and economies of scale.
Task-Specific Capabilities: Warehouse and Logistics Applications
Warehouse Material Handling: The Primary Use Case
The warehouse unloading task assigned to Toyota's Digit robots represents an ideal application for current-generation humanoid robot capabilities. The task involves discrete, repetitive cycles: approaching a tote, grasping it with appropriate force, retrieving it from the tugger, and placing it in a designated location. This cycle repeats hundreds or thousands of times daily. The task requires adaptation to variations in tote placement and orientation but doesn't require creative problem-solving or responding to complex environmental changes.
Warehouse and logistics applications more broadly represent the highest-volume current deployment area for humanoid robots. GXO Logistics operates extensive Digit robot fleets for logistics operations, completing millions of individual pick and place operations annually. This operational scale provides extensive data about robot reliability, maintenance requirements, and cost-of-ownership under production conditions. The success in logistics deployments informed Toyota's confidence in warehouse applications.
The warehouse domain presents particular advantages for humanoid robots: existing infrastructure (shelving, conveyor systems, totes) accommodates human-like robots naturally. Warehouses lack the extreme temperatures, corrosive environments, or explosive hazards present in some manufacturing settings, reducing design complexity. Logistics operations often operate in existing buildings rather than purpose-built facilities, making flexible robot designs valuable. The task complexity remains manageable for current-generation AI systems.
Advanced Manipulation: The Horizon of Capability
While Toyota's deployment focuses on straightforward part unloading, research labs worldwide work on far more sophisticated manipulation tasks. Robots performing assembly operations—inserting fasteners, connecting components, performing quality inspections—require significantly more dexterity and perceiving capability than warehouse unloading. Boston Dynamics has demonstrated remarkable humanoid agility including jumping, balance recovery, and complex locomotion, but these capabilities don't necessarily translate to manufacturing application value.
The gap between impressive laboratory demonstrations and practical manufacturing capability remains substantial. A robot that can sprint and jump demonstrates advanced control systems, but manufacturing applications prioritize reliability and predictability over athletic performance. This fundamental truth about robotics—that practical engineering often contradicts impressive research—shapes which capabilities manufacturers ultimately value.
However, emerging applications suggest future potential. Some manufacturers experiment with humanoid robots performing assembly-adjacent tasks: tool delivery, component sorting, quality inspection involving visual assessment and manipulation. These tasks require greater dexterity and decision-making than simple part unloading, but remain within realm of near-term capability as sensing and control systems improve.
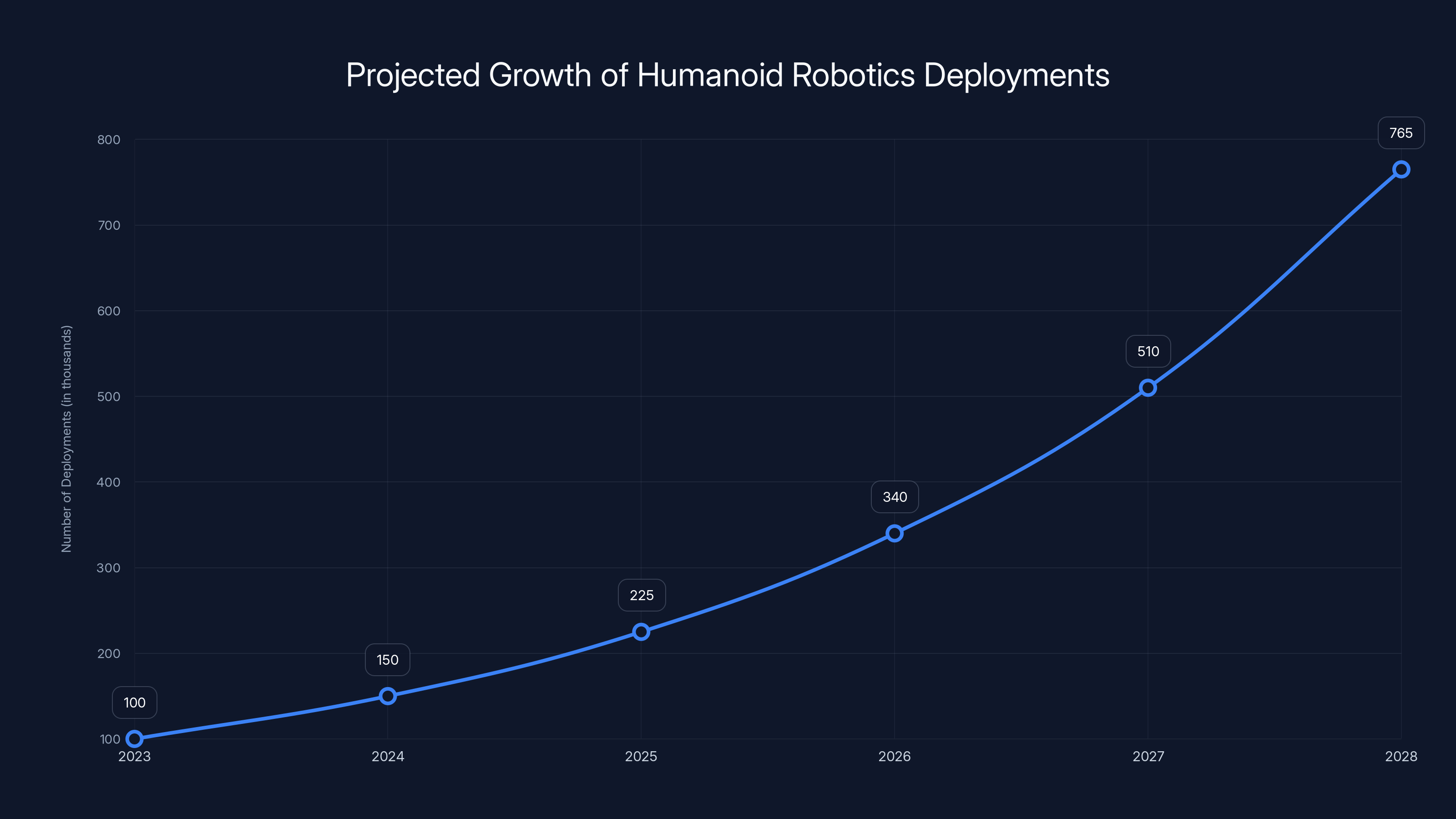
The deployment of humanoid robots is expected to grow significantly, with an estimated increase from 100,000 in 2023 to 765,000 by 2028. Estimated data based on industry trends.
Competing Technologies and Alternative Automation Approaches
Wheeled Mobile Manipulation Platforms
While humanoid robots capture significant attention, other robotics approaches address similar problems through different design philosophies. Wheeled mobile manipulation platforms—consisting of a wheeled base carrying a robotic arm—represent a mature alternative technology with significant current deployments. These platforms can navigate through warehouses, reaching shelves and performing pick operations with proven reliability and efficiency.
Compared to humanoid robots, wheeled platforms offer advantages in payload capacity and speed. The fixed base of a robotic arm enables greater lifting capability and faster movement than humanoid systems. For applications requiring heavy material movement or high-speed operation, wheeled platforms often outperform humanoids. Conversely, wheeled platforms require more infrastructure modification, cannot navigate stairs, and occupy more floor space.
The competition between humanoid and wheeled approaches isn't zero-sum: different applications favor different designs. Tasks in facilities with stairs or requiring human-scaled manipulation leverage humanoid advantages. Heavy-lifting warehouse operations may favor wheeled approaches. Most large logistics operators deploy both robot types in complementary roles, with humanoids handling tasks requiring human-proximate operation or human-scale object handling, and wheeled platforms handling bulk material movement in open warehouse areas.
Fixed Robotic Systems and Specialized Equipment
The traditional approach to manufacturing automation—fixed robotic arms on dedicated lines—remains dominant and will likely continue for high-volume, standardized manufacturing. A modern automotive assembly line incorporating hundreds of robots performing specific tasks with extreme efficiency and reliability represents incredible capital investment and engineering sophistication. Humanoid robots cannot currently outperform these specialized systems at their designed tasks.
The humanoid robot value proposition lies in flexibility and applicability to tasks for which dedicated automation infrastructure costs exceed economic justification. Warehouse unloading, as performed at Toyota, represents exactly this category: work currently performed by humans, difficult to automate with traditional approaches, but suitable for humanoid robots deployed in existing facilities.
Alternative Approaches: Exoskeletons and Wearable Enhancement
Some organizations pursue alternative approaches to the same problems humanoid robots address. Exoskeletons—wearable robotic systems that amplify human strength and endurance—represent one alternative. Instead of replacing workers with robots, exoskeletons enhance human workers, enabling them to work longer shifts without fatigue, lift heavier objects, and reduce injury risk. Companies in healthcare, manufacturing, and logistics pilot exoskeleton technologies.
Exoskeletons address different problem aspects than humanoid robots. They maintain human decision-making and adaptability while enhancing physical capability. However, they require human presence throughout shifts and don't eliminate the need for workers during off-shifts or expand production capacity beyond human workforce availability. The choice between exoskeletons and humanoid robots depends on specific organizational needs, workforce availability, and task characteristics.
Another approach involves process redesign to eliminate the need for robots entirely. Some organizations discover that workflow analysis and process optimization eliminate previously necessary tasks. Packaging redesign might eliminate the need for tote unloading entirely, for example. While less technologically exciting than deploying robots, process optimization often delivers superior cost-benefit and maintains more employment.

Software and AI: The True Foundation of Humanoid Robotics
Machine Learning for Continuous Improvement
The Arc platform represents only the beginning of AI's role in humanoid robotics. Emerging capabilities in machine learning enable robots to improve performance continuously through accumulated experience. A Digit robot performing the same warehouse unloading task thousands of times daily generates enormous datasets describing successful and unsuccessful manipulation approaches, variations in object placement, timing variations, and efficiency metrics.
Machine learning algorithms trained on this data can identify patterns: certain tote configurations prove more challenging than others, particular griping strategies fail more frequently in specific scenarios, timing patterns correlate with downstream process efficiency. The AI system uses these insights to adjust robot behavior, improving cycle time and reliability. This learning capability fundamentally distinguishes current-generation robots from previous automation: they improve through use rather than remaining static.
The distributed nature of modern robot fleets amplifies learning benefits. When thousands of Digit robots operate globally, the collective experience base enables machine learning at unprecedented scale. Insights generated from robots deployed in logistics facilities inform improvements to robots deployed in manufacturing. This knowledge sharing through cloud platforms represents significant competitive advantage for platforms like Agility with large robot fleet deployments versus competitors with limited operational experience.
Computer Vision and Object Recognition
Humanoid robot capability to perceive and respond to environmental variations depends on sophisticated computer vision systems. Digit robots incorporate multiple cameras providing detailed visual information about the environment. Deep learning-based vision systems trained on millions of images identify objects, estimate positions and orientations, and recognize variations that might require adaptive robot responses.
The specific challenge in manufacturing environments involves variation. A tote might be placed at slightly different angles or positions. Parts might be arranged differently based on prior operations. Objects might be partially obscured or in varying lighting conditions. Vision systems must recognize objects reliably across this variation spectrum. This real-world robustness exceeds the capability of vision systems trained on laboratory datasets, requiring continuous retraining as robots encounter new variations.
Current limitations in vision-based manipulation represent bottlenecks constraining robot capability. If vision systems fail to recognize object states accurately, robots cannot respond appropriately. If perception latency causes delays, robot cycle times extend. Improving vision capability directly improves robot utility. This bottleneck drives significant research investment in computer vision for robotics.
Reinforcement Learning and Autonomous Optimization
Advanced AI approaches including reinforcement learning hold potential for enabling robots to develop novel task solutions autonomously. Rather than programming specific motions, reinforcement learning systems allow robots to experiment with movements, learning which approaches successfully achieve goals. This approach requires careful system design: allowing enough freedom for genuine learning while maintaining safety constraints.
Current humanoid robot deployments incorporate reinforcement learning minimally—primarily in optimization of known task approaches rather than discovery of entirely novel solutions. However, research in robotics increasingly demonstrates that reinforcement learning approaches can discover creative solutions humans wouldn't intuitively program. Over time, as safety systems mature and AI capability improves, reinforcement learning-based robots will likely demonstrate increasingly sophisticated autonomous capabilities.
The transition from explicitly programmed robot behaviors to autonomously optimized behaviors represents a fundamental shift in robotics. The implications extend beyond manufacturing: autonomous robots with learning capability could adapt to novel situations, continuously improve through experience, and eventually operate with minimal human oversight. This vision drives much current robotics research investment.

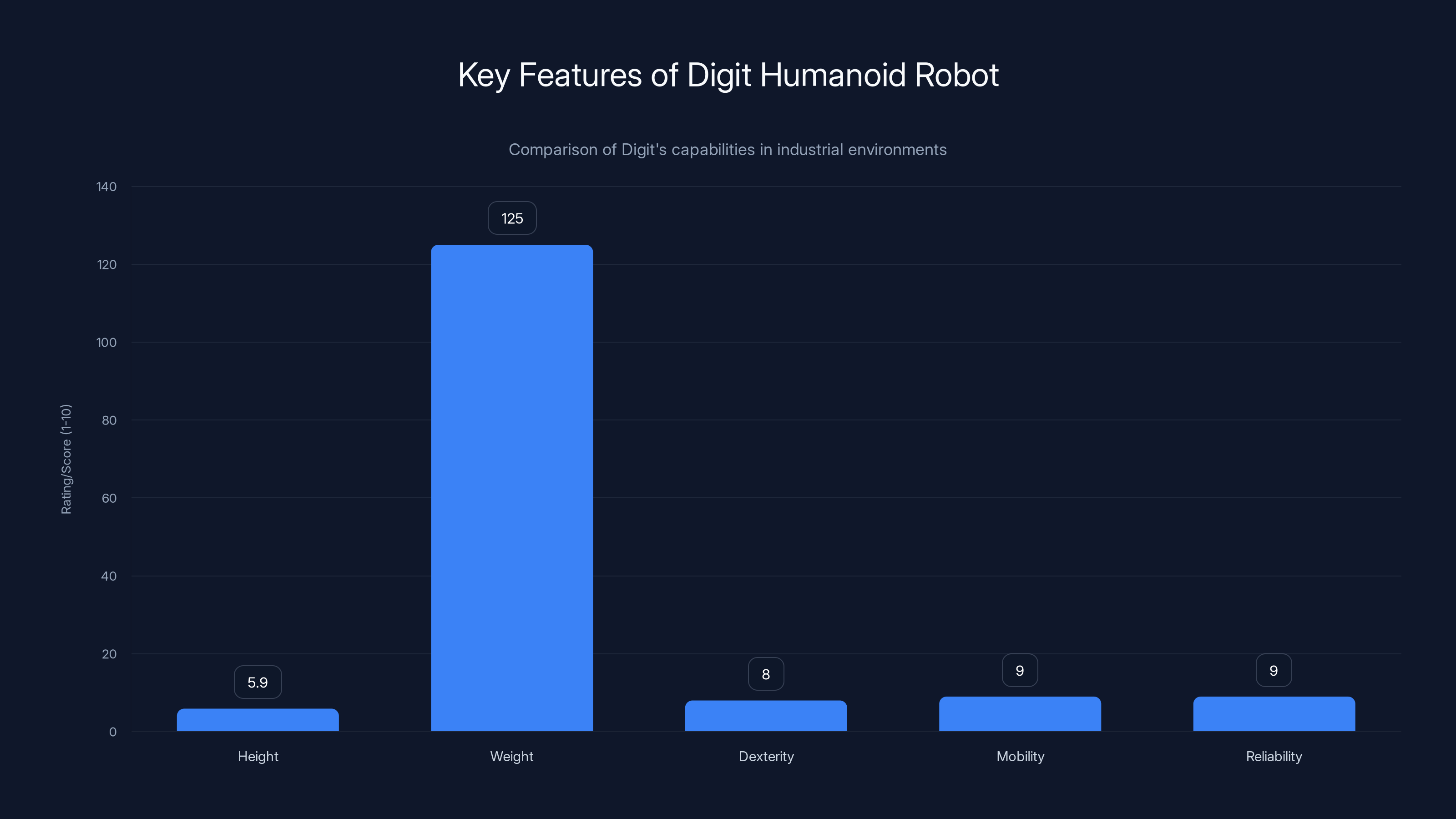
Digit is designed to excel in industrial settings with a focus on mobility, dexterity, and reliability. Estimated data based on typical humanoid robot capabilities.
Implementation Challenges and Lessons from Early Deployments
Integration Complexity: Hardware Meets Workflows
Toyota's experience deploying Digit robots in a production environment reveals practical challenges that theoretical analysis often overlooks. Hardware integration represents only the visible portion of deployment; invisible integration challenges consume substantial resources. The warehouse tugger system delivering totes to the unloading station must communicate with the robot control system, coordinate timing, and handle edge cases where tuggers arrive faster than robots can process them.
This integration required specialized engineering: developing interfaces between Toyota's warehouse management system and Arc, configuring robot behavior for Toyota's specific workflow, establishing contingency procedures if robots malfunction. The engineering work demands expertise spanning robotics, software systems, manufacturing processes, and facility operations. Organizations without in-house expertise must contract specialized integrators, consuming significant budgets and timeline resources.
Workflow integration also revealed operational constraints. Robots operate optimally when tasks remain relatively standardized and predictable. When production workflows change—new part configurations, modified tote designs, altered facility layouts—robots may require reconfiguration. The more rigid and standardized the workflow, the more effectively robots operate. This creates organizational pressures toward standardization that may conflict with production flexibility requirements.
Workforce Adaptation and Organizational Challenges
Beyond technical integration, deploying humanoid robots requires organizational adaptation. Workers must learn to interact safely with robots, understand new procedures, and potentially transition to different roles. Manufacturing unions, particularly in automotive, negotiate carefully over automation decisions given employment impacts. Successful deployments require addressing workforce concerns through transparent communication, workforce development, and in many cases, contractual agreements ensuring worker protections.
Toyota's reputation for progressive labor relations and workforce stability likely facilitated the Canadian deployment. The company has committed to maintaining employment at the facility and redeploying workers from warehouse unloading to other roles. This organizational commitment extends beyond humanitarian concern to business strategy: workforce cooperation and stability benefit long-term operations more than short-term cost reduction through layoffs.
The seven robots deployed represent not a massive workforce reduction but rather a tool supporting facility operations. The warehouse unloading task represents one component of overall facility work. Workers previously performing unloading might transition to quality inspection, material handling supervision, or robot maintenance—roles requiring human judgment and oversight. This transition requires training and organizational support, representing overhead costs that don't appear in simple cost calculations.
Maintenance and Support Infrastructure
Operating robots in production facilities requires establishing maintenance expertise and spare parts inventory. Unlike consumer products with centralized support centers, manufacturing robots often operate in isolated facilities requiring local technical support. Organizations must develop in-house expertise or establish service contracts with integrators. Spare parts—motors, sensors, computational components—must be available to minimize downtime when components fail.
The transition from laboratory robots (where manufacturer support attends personally to every issue) to production robots (where facilities operate independently with remote support from integrators) requires maturity in operational procedures and technical knowledge. Organizations underestimating these requirements often experience extended downtime and operational frustration. Successful deployments involve substantial investment in training and infrastructure development.

Future Trajectory: Where Humanoid Robotics Heads Next
Next-Generation Platforms and Capability Expansion
Manufacturer announcements suggest that humanoid robotics innovation will emphasize several capability vectors. Safety improvements enabling higher-speed operation and greater force application while maintaining human-safe operation represents one priority. Current humanoid robots incorporate speed and force limitations ensuring safety if humans contact the robot. Future systems aim to achieve equivalent safety through perception and control systems rather than mechanical limitations, enabling faster operation without safety compromise.
Greater dexterity for complex manipulation tasks represents another development direction. Current Digit hands incorporate sufficient dexterity for warehouse tasks but remain less capable than human hands for complex manipulation. Improving sensor feedback, control systems, and mechanical design will enable more sophisticated tasks. The competition with Figure AI's heavy-lift approach suggests that market will support multiple capability profiles: general-purpose humanoids like Digit and specialized heavy-duty platforms like Figure.
Autonomous charging and battery technology improvement will extend operational duration and reduce facility infrastructure requirements. Current systems require returning to charging stations every 8 hours, constraining operational scheduling. Longer-duration batteries or faster charging enable different operational models. Some researchers envision humanoid robots with multi-day operational capability, requiring only periodic charging.
Market Growth Projections and Adoption Timeframes
Industry analysts estimate that humanoid robot deployments will grow substantially over the next five years, with accelerating adoption as costs decline and capability improves. Current deployments remain concentrated in logistics and automotive, but other manufacturing sectors increasingly evaluate humanoid robots for specific applications. Food processing, electronics manufacturing, and pharmaceutical production present potential markets where automation traditionally faced challenges.
The critical question isn't whether humanoid robots will become common in manufacturing, but how quickly. Conservative projections suggest that substantial humanoid robot populations (thousands to tens of thousands of units) will exist by 2030. Optimistic projections suggest millions of units deployed worldwide within 15 years. The actual trajectory depends on capability improvements, cost reductions, regulatory development, and workforce adaptation.
Geographic variation will likely persist, with rapid adoption in developed economies facing labor shortages and high labor costs, slower adoption in regions with abundant low-cost labor. However, global supply chain considerations and quality requirements may drive humanoid adoption in unexpected regions as companies seek to re-shore manufacturing or reduce supply chain complexity.
Long-Term Societal Implications
The widespread adoption of humanoid robots carries implications far beyond manufacturing productivity. The transformation of work from primarily physical labor to supervisory and technical roles requires substantial educational investment and workforce development. Societies must prepare workers for these transitions, potentially through education system reforms, adult training programs, and social policies supporting worker income security during transitions.
The centralization of robotics capability among a few companies (Agility, Figure, Tesla, Boston Dynamics) raises questions about market concentration and technological access. If humanoid robotics becomes a critical manufacturing technology, but only a few companies control advanced platforms, significant power imbalances could emerge. Regulatory frameworks will likely emerge to ensure competition and prevent monopolistic control of critical technologies.
The relationship between humans and robots in workplaces will evolve substantially. Current approaches emphasize separation and safety. Future approaches may emphasize collaboration and augmentation, with robots and humans working together on complex tasks, each leveraging their comparative advantages. This evolution requires new interfaces, new training approaches, and new organizational structures.

Comparison with Alternative Automation Solutions
Humanoid Robots vs. Traditional Industrial Robots
While humanoid robots like Digit capture headlines and represent genuine innovation, traditional industrial robot arms remain the dominant automation approach in manufacturing. Understanding when humanoid robots provide advantages over traditional approaches requires careful analysis of task characteristics and deployment constraints.
Flexibility and Deployment: Traditional robots require custom installation and programming for each application. Deploying a robot arm to perform a different task might require months of engineering. Humanoid robots, by contrast, can transition between tasks more readily through software reconfiguration. This flexibility advantage proves most valuable for organizations with diverse manufacturing tasks or production environments that change frequently.
Speed and Payload: Industrial robot arms typically achieve higher speeds and can lift heavier loads than humanoid robots. For high-volume tasks requiring maximum throughput or heavy material movement, specialized robot arms outperform humanoids. The trade-off involves inflexibility—optimized for specific tasks but difficult to redeploy.
Space Requirements: Industrial robot arms occupy substantial floor space and typically require dedicated infrastructure. Humanoid robots occupy minimal additional space, fitting naturally into human-scaled facilities. For space-constrained facilities, humanoid robots offer advantages unavailable with traditional approaches.
Safety: Traditional robots require extensive safety infrastructure including barriers and interlocked systems. Humanoid robots incorporate safety into design, enabling closer human-robot proximity with fewer infrastructure modifications. This safety advantage translates to facility flexibility and reduced integration complexity.
Humanoid Robots vs. Wheeled Mobile Manipulation Platforms
Wheeled platforms combining a mobile base with a robotic arm represent a compromise between humanoid robots and fixed industrial systems. These platforms offer greater speed and payload capacity than humanoids while providing flexibility superior to fixed robots. The comparison between humanoids and wheeled platforms reveals trade-offs in specific capability dimensions.
Scalability and Stair Navigation: Humanoid robots navigate stairs and complex terrain; wheeled platforms typically cannot. This advantage matters significantly in multi-story facilities or environments with elevation changes. Toyota's deployment in a factory with standard flooring might not require this capability, but other environments find stair navigation valuable.
Floor Space and Facility Impact: Wheeled platforms typically require larger footprint than humanoid robots, consuming more facility space. In space-constrained environments, humanoids offer advantages. However, wheeled platforms, once optimized for logistics operations, occupy warehouse space naturally designed to accommodate wheeled equipment.
Payload and Speed: Wheeled platforms typically achieve higher payload capacity and faster movement than humanoid systems. For heavy-duty material handling, wheeled platforms often provide superior performance. The choice between platforms depends on specific task requirements.
Human Proximity Operations: Humanoid robots, with human-like dimensions and safety systems, operate comfortably in human-proximate environments. Wheeled platforms, larger and heavier, often work in segregated areas. For tasks requiring continuous interaction with human workers, humanoids offer advantages.
For Teams Considering Manufacturing Automation: A Broader Perspective
Organizations evaluating humanoid robots alongside other automation approaches should consider several dimensions. First, task specificity: highly specialized, high-volume tasks often benefit from custom robotic solutions rather than general-purpose humanoids. Second, facility constraints: space limitations, environmental challenges, and infrastructure availability shape which platform types prove practical. Third, workforce and organizational factors: workforce availability, skill levels, and organizational capacity for technology adoption influence success.
For teams focused on productivity and automation at scale, platforms specifically designed for your manufacturing domain often outperform general-purpose solutions. However, for facilities seeking flexible automation capable of adapting to changing production requirements, humanoid robots offer unique advantages. Similarly, teams prioritizing AI-powered automation and continuous optimization through machine learning benefit from platforms like Agility that emphasize AI integration and learning capability.
Alternative approaches including process redesign, workforce enhancement through exoskeletons, and optimization of existing equipment should always be evaluated before major capital investments in robotics. Often, the most cost-effective manufacturing improvement involves analyzing workflows and eliminating unnecessary tasks rather than automating them. This foundational thinking should precede robot selection and deployment.

Conclusion: Interpreting Toyota's Humanoid Robot Deployment
What the Toyota Deployment Represents
Toyota's decision to deploy seven humanoid robots in its Canadian facility represents an important inflection point in industrial automation. The decision signals that humanoid robotics technology has matured sufficiently for practical manufacturing applications beyond pilot programs. When a major manufacturer with decades of robotics experience and rigorous equipment evaluation standards commits to deploying robots from a relatively young company, it validates the technology's readiness.
Yet the deployment's scope—seven robots in one facility—provides context against grandiose expectations sometimes accompanying robotics announcements. This represents incremental addition to Toyota's manufacturing capabilities rather than revolutionary transformation. The seven robots automate one task category at one facility. Multiplied across Toyota's global operations, the potential impact scales substantially, but thoughtful observers should avoid extrapolating from individual facility deployments to wholesale manufacturing transformation.
The deployment also validates Agility's technology and business approach. The company's emphasis on practical deployment, cloud-based software optimization, and robots-as-service models proved more aligned with manufacturing needs than purely hardware-focused approaches. This market validation will likely accelerate capital availability and adoption of similar approaches by competitors.
The Broader Manufacturing Context
Toyota's decision occurs within context of accelerating industrial automation driven by labor economics, quality requirements, and competitive necessity. Developed economies with elevated labor costs and aging workforces increasingly rely on automation to maintain manufacturing competitiveness. Humanoid robots represent technology capability now available for tasks previously considered too complex or uneconomical to automate. This capability expansion enables automation approaches previously infeasible.
The deployment also reflects Toyota's strategic positioning. The company has committed to maintaining manufacturing operations in high-cost developed economies rather than shifting all production to lower-wage regions. Automation enables this strategy by improving productivity despite labor cost disadvantages. For Canada specifically, sustaining automotive manufacturing competitiveness requires continuous productivity improvement and technology adoption.
Realistic Expectations for the Technology
Well-informed observers should approach humanoid robotics with balanced perspective: genuine capability and practical value coupled with remaining limitations and realistic adoption curves. Humanoid robots can perform specific industrial tasks effectively, delivering measurable productivity and safety benefits. However, they represent one automation tool among many, suitable for particular applications rather than universal manufacturing solutions.
The technology will continue improving—faster operation, greater capability, lower cost, enhanced learning—but significant challenges remain. Deployment costs exceed hardware costs. Integration complexity requires specialized expertise. Workforce adaptation demands organizational commitment. The timeline for widespread adoption extends beyond optimistic predictions. These realities don't diminish the significance of current progress but counsel against expecting immediate revolutionary transformation.
Humanoid robots will become common in manufacturing environments where they provide clear advantages: facilities with space constraints, applications requiring operational flexibility, tasks combining standardization with environmental variation, and organizations prioritizing safety and worker welfare. Other applications will continue relying on traditional robots, specialized equipment, or human workers because those approaches remain superior for specific requirements.
Strategic Implications and Considerations
For manufacturing organizations evaluating whether humanoid robots address their needs, Toyota's deployment provides useful lessons. First, systematic evaluation comparing available platforms against specific task requirements proves essential. Second, realistic budgeting for integration and deployment costs—often exceeding hardware costs—ensures sound financial planning. Third, workforce engagement and development smooth organizational transitions. Fourth, starting with pilot deployments and scaling based on measured results reduces risk compared to massive simultaneous rollouts.
For technology companies and investors, the deployment validates a market for practical humanoid robotics with proven demand from major manufacturers. The logistics sector already demonstrates humanoid robot commercial viability. Manufacturing expansion validates that the applications extend beyond logistics to broader industrial sectors. This market validation attracts additional capital and talent to robotics development, accelerating innovation cycles.
For policy makers and workforce development professionals, humanoid robot adoption signals need for educational investment and training programs preparing workers for roles different from traditional manufacturing work. Societies must develop policies supporting worker transitions, educational curricula teaching robotics and technical skills, and social infrastructure maintaining income security during workforce evolution.
The Path Forward
The humanoid robotics industry stands at an inflection point. Toyota's deployment at production scale, coupled with prior logistics deployments and ongoing research advances, suggests that the technology has crossed from purely experimental to practically viable. The next phase involves broader industrial adoption, continuous capability improvement, and cost reduction through manufacturing scale.
Competition among multiple humanoid robot platforms will likely accelerate innovation and improve capabilities. Figure AI's heavy-lift approach, Boston Dynamics' mobility research, Tesla's vertical integration, and Agility's current leadership in deployments represent different competitive strategies. This competitive landscape ultimately benefits customers through capability improvements and competitive pricing.
The question facing manufacturing organizations isn't whether humanoid robots will impact their industry—the impact has begun—but rather how to prepare for the transition thoughtfully. Organizations that begin evaluating potential applications, developing integration capability, and engaging with technology providers early will position themselves advantageously as adoption accelerates. Those waiting for technology maturity risk falling behind competitors who establish expertise and relationships during early adoption phases.
Toyota's deployment represents a milestone in industrial automation history. Not the beginning of a revolution—practical industrial robotics adoption has progressed gradually for decades—but rather achievement of a capability threshold that opens new possibilities. The next phase of humanoid robotics development will reveal whether this technology transforms manufacturing fundamentally or settles into specialized niches. Based on Toyota's careful evaluation and deployment, the former trajectory seems increasingly likely.

FAQ
What are humanoid robots in manufacturing?
Humanoid robots are mobile robots designed with human-like form factors including two arms, two legs, and a torso, enabling them to navigate and operate in spaces designed for human workers. In manufacturing, robots like Digit perform tasks including material handling, part unloading, assembly support, and quality inspection. The human-like design allows these robots to use existing tools and infrastructure without modification, unlike specialized industrial robots that require custom integration.
How does Digit handle complex warehouse tasks?
Digit incorporates advanced sensing systems including RGBD cameras, force-sensing fingertips, and inertial measurement units that provide detailed environmental awareness. The robot uses computer vision to identify totes and their positions, adjusts griping strategies based on object characteristics, and maintains balance while carrying loads. The Arc software platform coordinates Digit's movements with warehouse management systems, ensuring the robot retrieves totes at appropriate times and places them in correct locations.
What are the primary benefits of deploying humanoid robots in manufacturing?
Manufacturers deploying humanoid robots gain several advantages including improved productivity through continuous operation without breaks or fatigue, enhanced safety by removing workers from repetitive physical tasks, operational flexibility through robots' ability to adapt to varied task variations, and cost efficiency when evaluated across complete lifecycle including integration, operation, and maintenance. Additionally, robots maintain consistent quality and can operate continuously during extended facility hours, increasing facility throughput.
How much does a Digit humanoid robot cost?
Digit robots typically cost between
What is the Arc platform and why does it matter?
Arc is Agility Robotics' cloud-based software platform managing Digit robot fleets and optimizing task performance. Arc provides features including centralized monitoring of multiple robots across locations, task configuration and optimization, predictive maintenance scheduling, performance analytics, and integration with customer warehouse management systems. The platform incorporates machine learning to continuously improve robot performance based on accumulated operational data, directly addressing the deployment cost challenges that historically limited robot adoption.
How safe is working alongside humanoid robots?
Digit incorporates multiple overlapping safety systems ensuring safe human-robot collaboration. Force-limiting technology prevents the robot from applying dangerous force levels if it contacts human workers. Movement speed and acceleration constraints limit potential impact severity. Perception systems enable robots to detect human presence and adjust behavior to maintain safe distances. However, comprehensive safety depends on proper facility design, worker training, and operational procedures, with manufacturers implementing these requirements systematically before deployment.
What tasks can humanoid robots perform beyond warehouse unloading?
While current deployments concentrate on warehouse and logistics tasks, humanoid robots can perform various manufacturing and assembly-adjacent tasks. Emerging applications include tool delivery, component sorting by type or condition, quality inspection involving visual assessment and limited manipulation, parts assembly support where the robot delivers components to human workers or holds parts during assembly, and facility maintenance tasks like equipment monitoring or facility cleanup. As AI and robotic dexterity improve, more complex assembly operations become feasible.
How do humanoid robots compare to traditional industrial robot arms?
Humanoid robots offer advantages in flexibility (easier to redeploy between tasks), space efficiency (smaller footprint), and facility integration (work in human-scaled spaces without infrastructure modification). Traditional robot arms offer advantages in speed, payload capacity (heavier lifting), and specialized task optimization. For high-volume standardized tasks, traditional robots often outperform humanoids. For flexible manufacturing requiring rapid task changes, humanoids often provide superior value. Most large manufacturers deploy both robot types in complementary roles.
What is the employment impact of humanoid robot deployment?
Robot deployment reduces employment in specific task categories (like warehouse unloading) but creates demand for new roles including robot operation, maintenance, programming, and facility optimization. The net employment impact depends on organizational decisions: companies can reduce total employment through attrition, maintain employment while improving facility efficiency, or reinvest productivity gains in production expansion creating new jobs. Toyota's approach emphasizes maintaining employment by transitioning workers from unloading to higher-value roles, representing responsible deployment practices.
What is the typical return-on-investment timeline for humanoid robots?
Realistically, humanoid robots demonstrate positive ROI within 3-5 years when deployed in appropriate applications. For continuous high-volume tasks like warehouse unloading, ROI timelines skew toward the faster end of this range. For less structured tasks with greater variability, ROI extends proportionally. The timeline assumes effective integration, reliable operation, and appropriate task selection. Organizations experiencing integration difficulties or task-robot misalignment may require extended periods to recover investments.
What does Toyota's deployment reveal about humanoid robot maturity?
Toyota's decision to deploy robots at production scale after a one-year pilot program signals that humanoid robots have matured beyond purely experimental status. Toyota operates with rigorous equipment evaluation standards, and deployment in a RAV4 manufacturing facility—a high-volume production line—indicates confidence that robots meet demanding manufacturing requirements. The deployment doesn't suggest robots have solved all challenges, but rather that they've achieved sufficient capability and reliability for practical industrial applications. The decision likely accelerates broader manufacturing adoption and investment in competing platforms.

Key Takeaways
- Toyota's seven-robot deployment signals humanoid robotics maturity crossing from experimental to production-level industrial application
- Digit robots perform warehouse unloading—repetitive, physically demanding work—while maintaining safety alongside human workers through force-limiting and perception systems
- Deployment costs often exceed robot hardware costs by substantial margins, requiring investment in integration engineering, training, and workflow optimization
- Humanoid robots offer flexibility and space efficiency advantages over traditional industrial robot arms, but lack payload capacity and speed for heavy-duty applications
- Machine learning integration through Arc platform enables continuous performance improvement and cost optimization across robot fleets
- Success requires systematic evaluation, realistic budgeting, workforce engagement, and phased rollout strategies rather than expecting immediate revolutionary transformation
- Broader manufacturing context shows labor economics, quality requirements, and workforce aging drive automation adoption across developed economies
- Multiple competing platforms (Figure, Boston Dynamics, Tesla) suggest specialized designs will address different manufacturing applications rather than single dominant solution
- Realistic ROI timeframe of 3-5 years supports business case for appropriate applications while broader adoption timeline extends beyond optimistic predictions
Related Articles
- Siemens Automation & AI: The Future of Smart Factories 2025
- 16 Top Logistics & Manufacturing Startups: Disrupt Battlefield 2026 [2025]
- Didero AI Procurement Automation: Complete Guide & Alternatives
- Gather AI's $40M Funding: Why Curious Warehouse Drones Change Logistics [2025]
- Physical Intelligence: Building Robot Brains in 2025 & Beyond
- Tesla Discontinues Model S and Model X in Q2 2026: What It Means [2025]

