
Introduction: The Future of Urban Mobility is Here
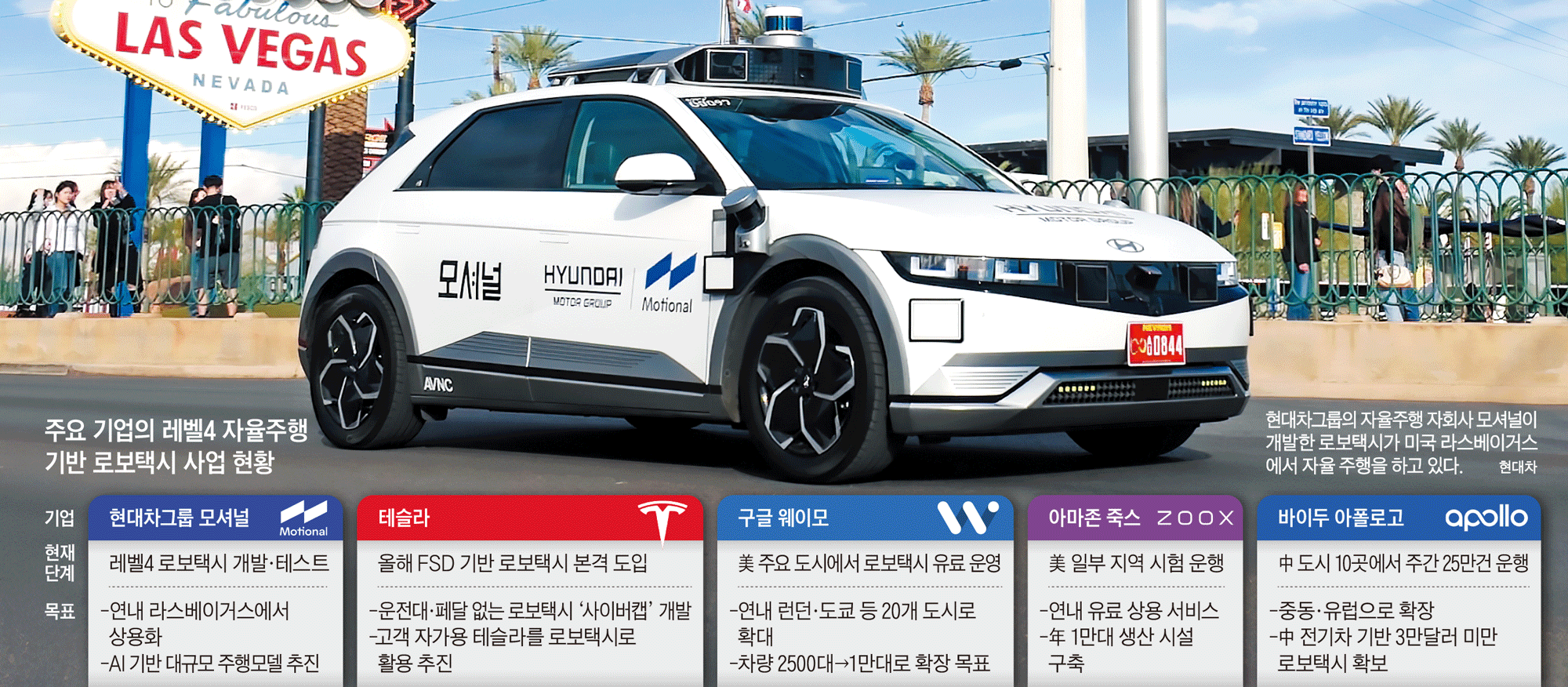
The autonomous vehicle industry has reached a critical inflection point. For years, self-driving technology existed primarily in controlled environments, test tracks, and carefully curated pilot programs. But something fundamental shifted when Hyundai partnered with Motional to deploy fully-autonomous robotaxis on one of the world's most challenging urban environments: the Las Vegas Strip. This isn't a contained test in a suburban neighborhood—it's real-world deployment in a chaotic, densely-populated entertainment district where unpredictable human behavior, dense traffic, pedestrian congestion, and complex road conditions create continuous challenges.
The significance of this development extends far beyond Las Vegas. This robotaxi represents a watershed moment for autonomous vehicle technology, demonstrating that fully self-driving capabilities can handle not just straightforward highway driving or simple urban routes, but genuinely unpredictable and complex traffic scenarios. After decades of incremental progress, billions in investment, and countless technical breakthroughs, the industry is finally delivering on its promise to transform urban transportation.
What makes this launch particularly noteworthy is that it's happening with a partnership that combines Hyundai's automotive manufacturing expertise with Motional's cutting-edge autonomous driving software. Hyundai brings decades of vehicle engineering, supply chain management, and mass production capabilities. Motional contributes advanced AI systems, computer vision technology, and autonomous driving algorithms developed through years of real-world testing. Together, they're creating something that could fundamentally reshape how people move through cities.
But the implications go deeper still. The success of a Las Vegas robotaxi service provides a crucial data point about the viability of autonomous vehicles in complex urban environments. If this works reliably and safely on the Strip—arguably one of the most challenging driving environments in America—it validates the entire premise that autonomous vehicles can handle real-world conditions. This success could accelerate deployment timelines for similar services in other major cities, influence regulatory frameworks for autonomous vehicles, and reshape urban transportation planning for the coming decade.
This comprehensive guide explores every dimension of Hyundai's autonomous robotaxi initiative, from the underlying technology powering the vehicles to the practical implications for riders, the automotive industry, and urban transportation infrastructure. We'll examine what makes this technology work, why Las Vegas was chosen as the deployment location, what challenges remain, and how this fits into the broader landscape of autonomous vehicle development globally.
Understanding Hyundai's Autonomous Robotaxi: Core Technology Explained
The Foundation: Motional's Autonomous Platform
The Hyundai-Motional robotaxi is built on Motional's autonomous driving platform, a comprehensive software and hardware system that enables vehicles to navigate complex environments without human intervention. This platform represents years of development, testing, and refinement, incorporating machine learning systems, sensor fusion technologies, and decision-making algorithms that collectively allow the vehicle to perceive its environment, understand traffic rules, predict the behavior of other road users, and navigate safely.
Motional's platform processes multiple data streams simultaneously. Primary among these is lidar—light detection and ranging technology that creates a three-dimensional map of the vehicle's surroundings by bouncing laser light off objects and measuring the return time. This lidar system provides incredibly precise spatial information about obstacles, lane markings, pedestrians, cyclists, and other vehicles within a typical range of 100-150 meters. Unlike human vision, lidar is largely unaffected by lighting conditions, making it equally effective in daylight, darkness, and challenging lighting situations.
Complementing the lidar system are multiple camera feeds covering 360-degree views around the vehicle. These cameras capture visual information with far greater detail than lidar can provide, allowing the system to identify traffic signals, read signs, distinguish between different types of obstacles, and recognize important visual cues that inform driving decisions. A typical Motional-equipped robotaxi includes cameras facing forward, backward, left, right, and diagonally to create comprehensive visual coverage.
Radar systems complete the sensor suite, providing velocity data about moving objects and tracking multiple targets simultaneously. Radar excels at detecting moving objects and determining their speed and direction, making it particularly valuable for tracking traffic flow, identifying vehicles in adjacent lanes, and monitoring fast-approaching objects. The integration of lidar, camera, and radar systems—called sensor fusion—creates a redundant and highly robust perception system where the vehicle can cross-verify information from multiple sensors to ensure accuracy and safety.
Processing Power and AI Decision-Making
Raw sensor data alone doesn't create autonomous driving—interpretation does. The Motional platform includes powerful computing systems that process sensor data in real-time, typically handling thousands of data points per second. Modern autonomous driving systems use deep learning neural networks trained on massive datasets containing millions of hours of driving footage, allowing the system to recognize patterns and make predictions about how traffic situations will develop.
The AI system must make dozens of micro-decisions per second: Should the vehicle maintain its current lane or change lanes? Is that pedestrian likely to step into traffic? How should the vehicle respond if another driver suddenly cuts in front? Should the vehicle accelerate slightly to avoid an unexpected obstacle or brake gently to let traffic pass? These aren't simple if-then rules—they're probabilistic decisions based on patterns learned from training data and real-time environmental analysis.
Crucially, the system includes extensive safety layers. If primary systems fail, backup systems take over. The vehicle maintains communication with remote monitoring centers where human operators can observe vehicle status and, if necessary, intervene. The system also includes geofencing—invisible boundaries that keep the vehicle operating only in areas where it's been tested and approved. Initial deployments of autonomous vehicles typically use geofencing to restrict operation to specific areas, reducing complexity and ensuring the vehicle operates in well-mapped, previously-tested territory.
Hardware Integration: Hyundai's Vehicle Platform
While Motional provides the autonomous driving intelligence, Hyundai provides the vehicle itself—purpose-built or modified to carry autonomous systems safely and reliably. The robotaxi is likely based on Hyundai's Ioniq platform, a modern electric vehicle designed for reliability and efficiency. This choice matters because electric vehicles offer several advantages for autonomous deployment: they're quieter (reducing driver distraction if monitoring occurs), they're increasingly cost-effective to operate, and they align with environmental goals for reducing urban transportation emissions.
The vehicle must be extensively modified to accommodate autonomous systems. This includes mounting sensors on the roof and bumpers, integrating computing systems, installing backup power systems to maintain operation if the main power system fails, and creating communication infrastructure to connect the vehicle to remote monitoring centers. The vehicle's electrical systems must be redesigned to support autonomous operation, including systems for the AI platform to control steering, acceleration, and braking.
Hyundai's involvement ensures that this autonomous system isn't a bolted-on afterthought but rather integrated into the vehicle's design from the ground up. This integration affects everything from thermal management (keeping computing systems cool during hot Las Vegas summer days) to power distribution to system redundancy for safety-critical functions.

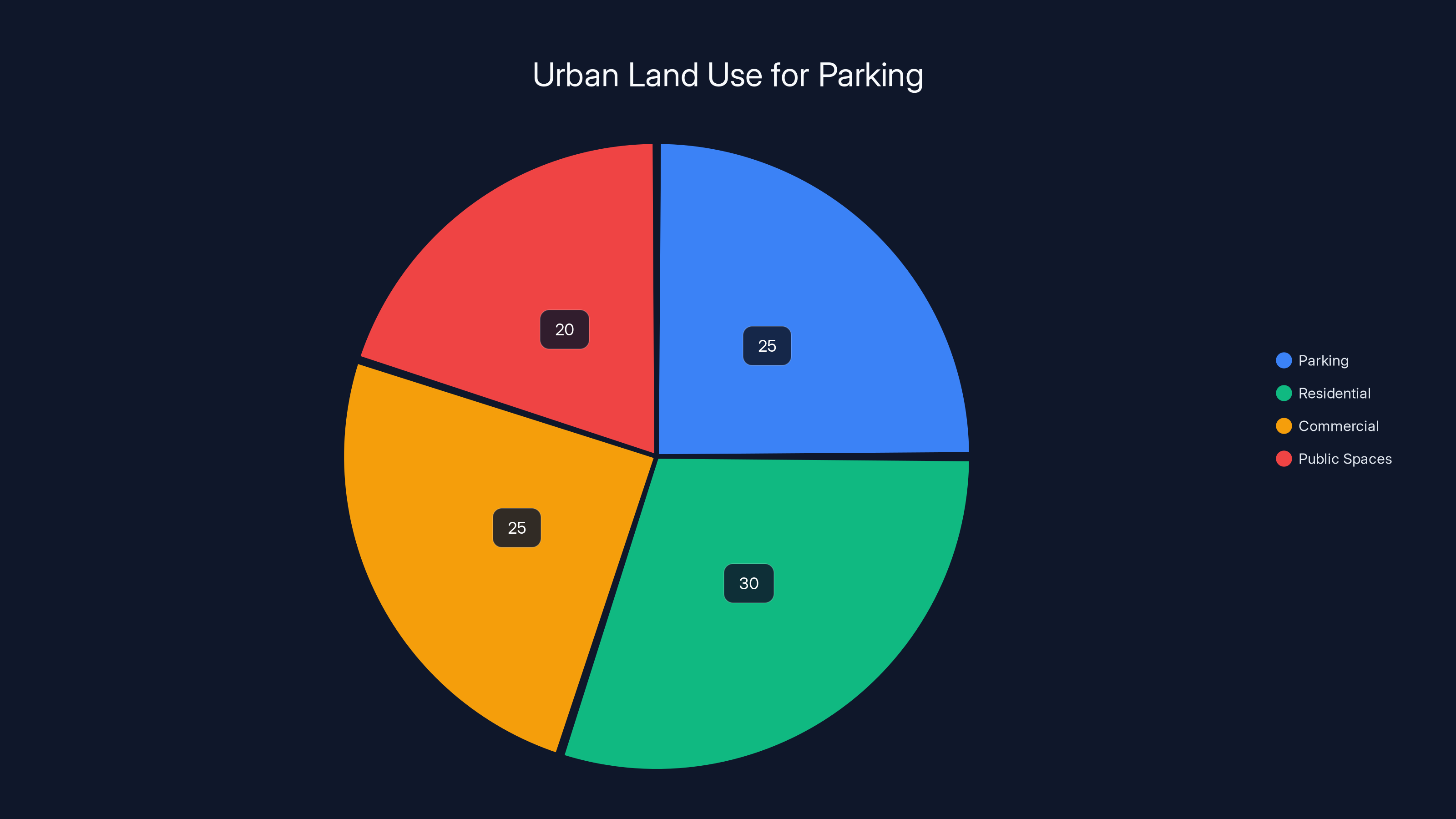
Estimated data: In dense urban areas, approximately 25% of land is used for parking. Reclaiming this space for residential and public use could significantly improve urban living conditions.
Las Vegas as the Proving Ground: Why This Location Matters
Environmental Complexity: The Ultimate Test
Las Vegas presents a unique and genuinely challenging environment for autonomous vehicles. The city isn't just bustling—it's orchestratedly chaotic. The Strip itself combines elements that make autonomous driving exponentially harder than suburban routes. Dense pedestrian traffic, with crowds unpredictably stepping into streets. Frequent sudden lane changes as tourists navigate unfamiliar routes. Complex intersections where multiple traffic flows merge and diverge. Unexpected obstacles like street performers, outdoor furniture, and parked vehicles in unconventional locations.
Beyond the Strip, Las Vegas presents other challenges. The city experiences significant temperature variations, from winter nights near freezing to summer days exceeding 115°F. These temperature extremes affect sensor performance, battery efficiency, and system reliability. The city's dry climate means sensor accumulation (dust and sand coating camera lenses and lidar components) presents ongoing challenges. Traffic patterns vary dramatically between weekday and weekend, between tourist season and off-season, between day and night.
Moreover, Las Vegas attracts drivers from around the world, many unfamiliar with local traffic patterns. This increases the unpredictability factor—the autonomous system must anticipate not just normal traffic behavior, but erratic behavior from confused or distracted drivers. The city's large number of rideshare vehicles, rental cars, and commercial vehicles creates constant variation in traffic composition. If an autonomous vehicle can handle Las Vegas, it can handle many other challenging urban environments.
Strategic Business Rationale
Beyond environmental factors, Las Vegas offers strategic advantages for autonomous vehicle deployment. Nevada has developed relatively progressive regulatory frameworks for autonomous vehicles, with a state government actively supporting AV development and a clear process for obtaining approval to operate autonomous services. This regulatory clarity reduces bureaucratic barriers and accelerates deployment timelines compared to states where regulations remain unclear or restrictive.
Las Vegas also has significant tourism and business infrastructure that creates built-in demand for transportation services. Tourists arriving at hotels and casinos need ways to move around the city. Many prefer not to rent cars or navigate unfamiliar streets themselves. A reliable, safe autonomous transportation service solves a real problem for this market. The city's relatively compact major tourist areas (the Strip and downtown) create clear, well-defined deployment zones.
Additionally, Las Vegas has an existing gig economy and on-demand transportation culture. Rideshare services are deeply integrated into how people move through the city. Consumers already use apps to request transportation and don't necessarily mind who or what provides that transportation—whether a human driver or an autonomous vehicle. This cultural readiness for app-based, on-demand transportation reduces the adoption barriers that might exist in other cities.
Network Effects and Market Size
Successfully launching in Las Vegas creates powerful network effects. A successful service with strong safety records, good coverage, and customer satisfaction becomes a proof point that influences other cities to permit autonomous vehicle deployment. Investors gain confidence in the technology and business model. Other automotive manufacturers and technology companies accelerate their own autonomous vehicle programs. Cities that might have been hesitant to allow autonomous vehicles see the success and implement their own pilot programs.
The Las Vegas market itself offers substantial revenue potential. With approximately 40 million visitors annually, plus a local population exceeding 600,000, the addressable market for on-demand transportation is enormous. Even if autonomous vehicles capture only a small percentage of this market, it represents significant revenue. The higher transaction volume from tourists and locals creates more data for system improvement and faster accumulation of real-world experience.
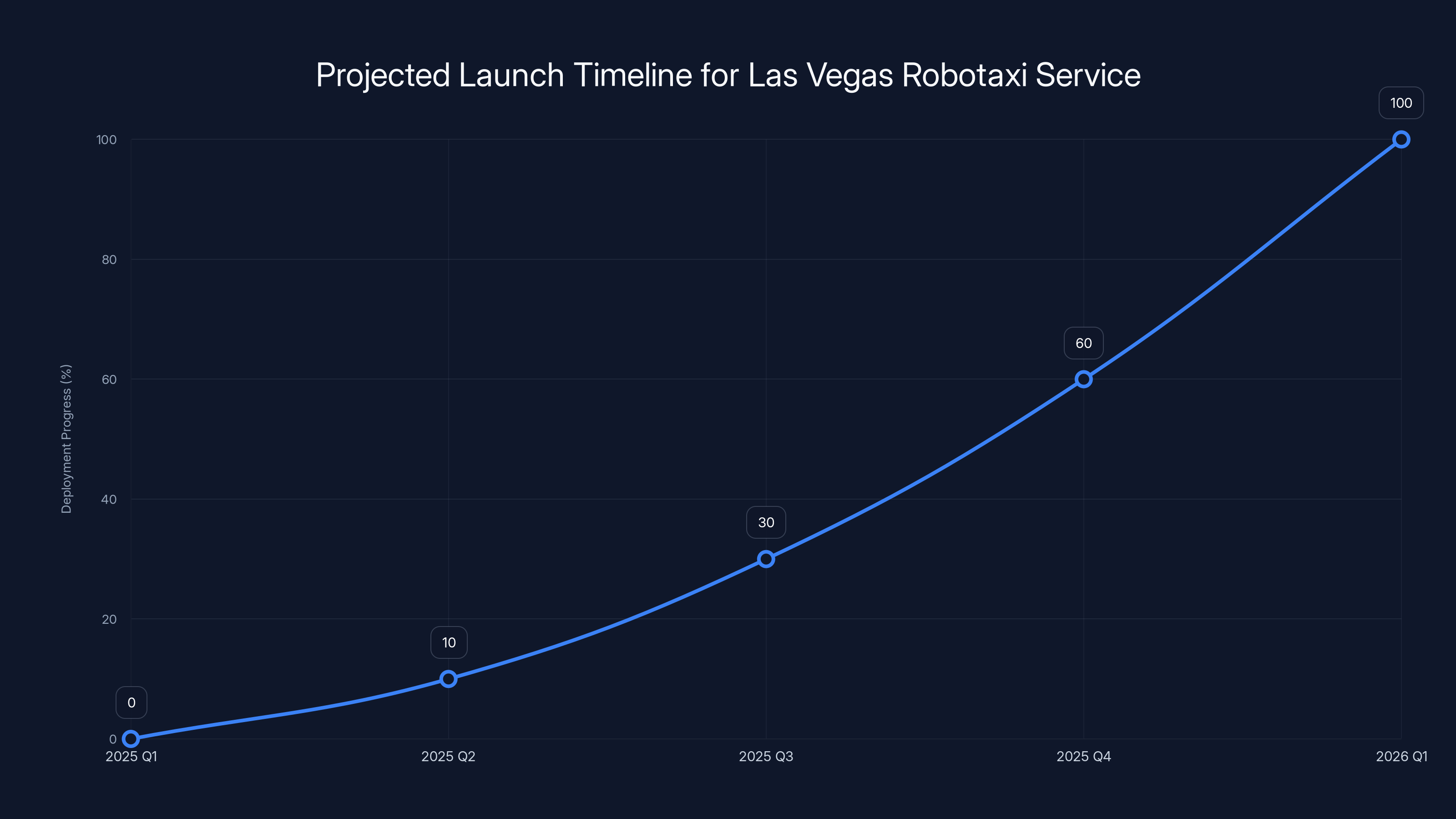
The Las Vegas robotaxi service is expected to launch in late 2025, with gradual expansion into 2026. Estimated data based on planned timelines.
Technical Capabilities: What the Robotaxi Can Actually Do
Navigation and Route Planning
The Hyundai-Motional robotaxi operates with sophisticated navigation capabilities that go far beyond basic GPS routing. The system uses high-definition maps that include not just road locations but lane-level detail, turn restrictions, speed limits, and traffic signal locations. These maps are regularly updated as road conditions change, construction areas appear, or infrastructure is modified.
Route planning considers far more than distance. The system optimizes for passenger comfort, considering factors like aggressive acceleration or braking that might make passengers uncomfortable. It considers traffic patterns and predictions, attempting to route toward less congested areas when possible. It factors in road surface conditions, preferring smoother routes when alternatives exist. The system can adapt routes in real-time if traffic conditions change dramatically or if unexpected obstacles appear.
Crucially, the navigation system respects geofenced operational boundaries. Initially, the Las Vegas robotaxi service will likely operate only in well-tested areas—likely the Strip and possibly surrounding zones where the vehicle has been thoroughly tested. The system won't attempt to navigate to areas outside these boundaries; if a passenger requests a destination outside the operational area, the service will decline or offer alternative transportation.
Traffic Interaction and Complex Scenarios
Navigating traffic safely requires understanding and predicting human driver behavior, a far more complex challenge than simply following traffic rules. The Motional platform includes systems trained to recognize traffic patterns and anticipate likely behaviors. When approaching an intersection, the system doesn't just check if the traffic light is green—it monitors the behavior of vehicles at the intersection, checking whether other drivers are actually obeying the signal. If a vehicle runs a red light, the autonomous system recognizes this and adjusts its behavior accordingly.
The vehicle can handle complex traffic scenarios that would challenge many human drivers. It recognizes and safely navigates around double-parked vehicles, construction zones with temporary lane markings, police or emergency vehicles signaling traffic to move aside, and pedestrians in crosswalks. It understands right-of-way conventions and can navigate complex intersections where multiple traffic flows interact.
Performance in these scenarios doesn't always involve perfect behavior. Sometimes safe autonomous driving means being slightly cautious, taking slightly longer to complete a maneuver to ensure safety, or yielding in situations where the vehicle has legal right-of-way but where yielding improves overall safety. The system prioritizes safety over efficiency or speed, a design philosophy that should maintain public confidence in the technology.
Passenger Comfort and Communication
Beyond basic transportation, the robotaxi includes features designed for passenger experience. The vehicle includes displays that show the passenger the planned route, current location, and estimated arrival time—information that would normally come from a human driver providing periodic updates. The system can detect safety hazards and adjust acceleration, deceleration, and turning to minimize sudden movements that cause discomfort.
Interior cameras allow remote operators to see inside the vehicle if needed and communicate with passengers. This addresses emergency situations where a passenger needs assistance, a medical event occurs, or the vehicle encounters a situation it cannot safely navigate. The remote operator can provide guidance, call emergency services if needed, or coordinate resolution of the situation.
Climate control, seat adjustments, and other comfort features can be pre-set before the ride or adjusted through in-vehicle touchscreens. Accessibility features allow passengers with mobility limitations to request appropriate vehicles or additional assistance. These comfort and convenience features transform autonomous vehicles from mere transportation into services comparable to premium rideshare services.

Safety: The Foundation of Public Trust
Redundancy and Fault Tolerance
Autonomous vehicle safety depends fundamentally on redundancy—multiple systems performing the same functions so that if one fails, others maintain safety. This redundancy applies to every critical system. Multiple processors run autonomous driving software independently, cross-checking their decisions. If they diverge significantly, failsafe systems engage. Multiple sensor types (lidar, camera, radar) observe the same environment, and the system identifies and flags situations where sensor inputs diverge, potentially indicating sensor failure.
Power systems include batteries and backup power sources ensuring that if primary power fails, the vehicle can safely come to a stop. Braking systems often include redundant hydraulic lines so that if one braking circuit fails, others maintain braking capability. Steering systems similarly include redundancy. The design principle is that multiple independent failures would be required for the vehicle to lose critical capabilities.
This redundancy creates what engineers call fault tolerance—the ability to continue operating safely even when some systems fail. The system continuously monitors its own health, running diagnostics on sensors, computing systems, and actuators. If the system detects a fault it cannot safely manage, it enters a failsafe mode: reducing speed, moving to the side of the road, and stopping. Remote operators are immediately notified and can assess the situation.
Testing and Validation
Before deploying autonomous vehicles on public roads, Motional has conducted thousands of hours of testing in simulated environments and real-world controlled conditions. This testing validates that the system performs reliably in various weather conditions, at different times of day and night, in different traffic densities, and during unusual events. Testing captures edge cases—the unusual situations that occur rarely but require correct handling.
Las Vegas deployment doesn't begin with completely unrestricted operation. Initial phases involve limited routes, specific times of day, and close monitoring. The service likely starts with favorable conditions (good weather, moderate traffic) and gradually expands to more challenging conditions as the system proves its reliability. Metrics like miles driven without safety incidents, rate of disengagement (where the system alerts a human operator who takes over), and customer reported issues all inform expansion decisions.
Comparable to aviation's approach to new aircraft types, autonomous vehicles undergo extensive certification and testing before commercial deployment. Regulators review safety protocols, test results, system architecture, and redundancy measures before approving public operation. This regulatory oversight provides assurance that vehicles meeting these standards have been thoroughly evaluated for safety.
Real-World Safety Track Record
Motional and its predecessors have been testing autonomous vehicles on public roads for years, accumulating safety data that compares favorably to human drivers. In testing to date, autonomous vehicles in controlled programs have demonstrated accident rates significantly lower than the general driving population. These vehicles don't get distracted by phones, don't drive impaired, and don't experience fatigue. They're not aggressive drivers; they're programmed to prioritize safety over speed.
Of course, the relevant comparison isn't autonomous vehicles versus perfect driving—it's versus actual human driving performance. The average human driver experiences accidents at rates measured in collisions per million miles driven. Autonomous vehicles in testing have demonstrated rates substantially below this, though the data set remains smaller than human driving data, making statistical confidence lower.
The true safety validation will come from real-world operation. As autonomous vehicles log hundreds of thousands and eventually millions of miles on public roads, the safety record accumulates. The first autonomous vehicles to operate commercially will be scrutinized intensely. Any accidents receive significant media attention. This scrutiny creates strong incentives for developers to maintain the highest safety standards, as safety failures could set back the entire industry.

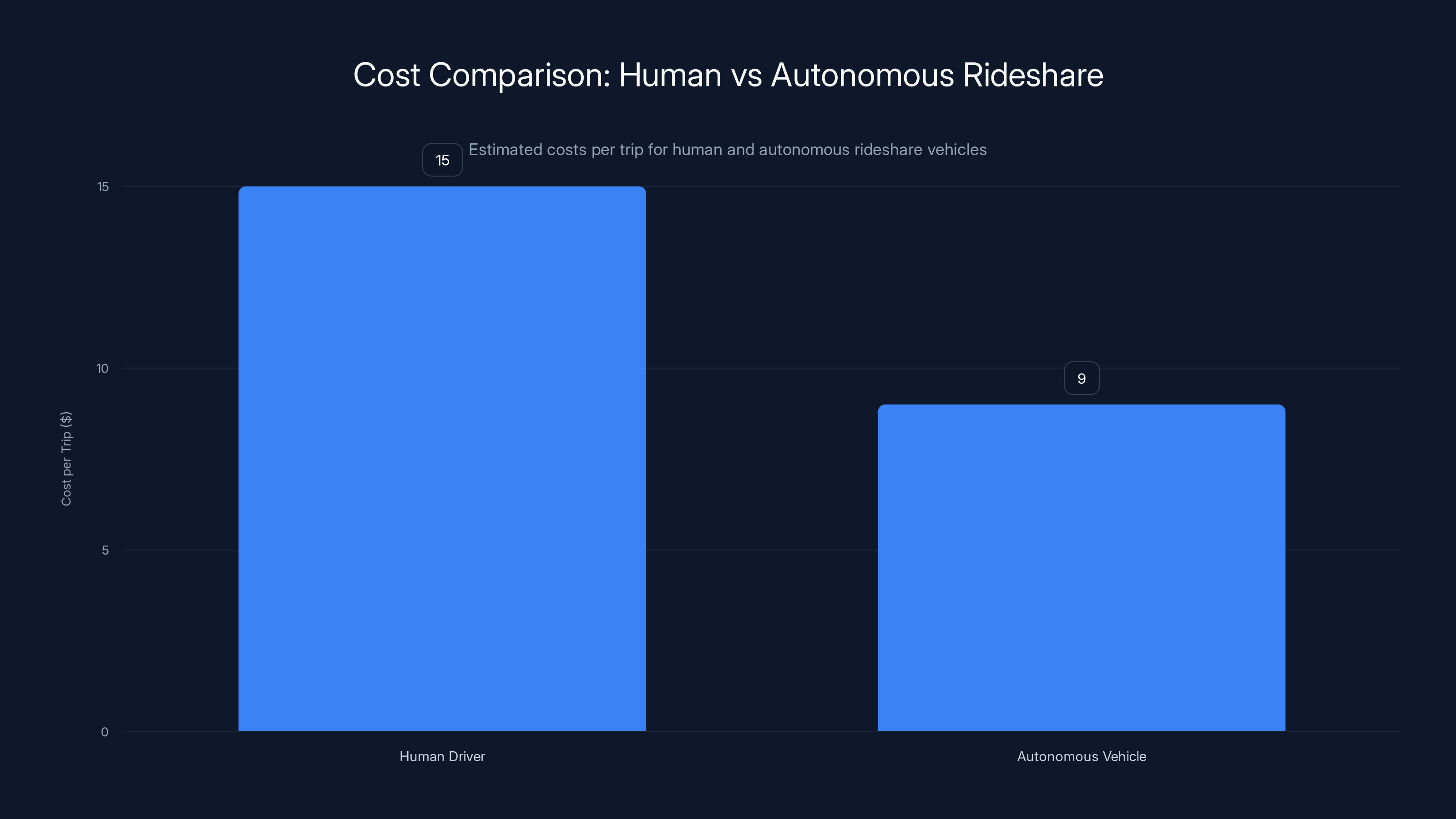
Autonomous rideshare vehicles can reduce trip costs by 40% compared to human-driven rideshares, primarily due to the elimination of labor costs. Estimated data.
The Passenger Experience: What Riding in an Autonomous Robotaxi Actually Feels Like
Booking and Pickup
The passenger experience begins with a smartphone app, similar to existing rideshare services like Uber or Lyft. A passenger specifies their location and destination, reviews the estimated fare and arrival time, and confirms the request. The app displays vehicle information, including its location and estimated time to arrive. As the vehicle approaches, the app provides updates on its location, allowing the passenger to track the vehicle's arrival.
When the vehicle arrives, it parks in a designated area and signals the passenger through the app or by honking. Unlike human drivers who might call or text, the autonomous vehicle communicates through the app and possibly a message on its digital display. The passenger approaches the vehicle, and the doors unlock via the app or by pressing a button on the vehicle. Passengers with accessibility needs might request assistance through the app, which can be provided by a remote operator communicating through speakers and cameras in the vehicle.
Pickup times vary based on demand and vehicle availability, similar to existing rideshare services. During off-peak hours, wait times might be five to ten minutes. During peak periods on the Strip, wait times could extend to 15-20 minutes, though the system's real-time optimization tries to minimize this. The surge pricing models used by human-driven rideshare—where prices increase dramatically during peak demand—likely apply to autonomous vehicles as well.
The Ride Itself
Once inside the vehicle, passengers encounter a modern, clean interior designed for comfort and safety. The cabin is quieter than vehicles with traditional combustion engines, a significant difference given the electric drivetrain. Passengers can see the planned route on an interior display, showing turn-by-turn navigation, current traffic conditions, and estimated arrival time. The display updates in real-time, so passengers always know where they are and how long until arrival.
The ride itself should feel smoother than rideshare with human drivers. The autonomous system accelerates and brakes gently, without the sudden jerky movements that characterize aggressive human driving. Turns are smooth and controlled. The vehicle anticipates traffic events and adjusts speed gradually rather than making abrupt corrections. This smoother ride reduces passenger discomfort and motion sickness, particularly valuable for passengers with sensitivity to motion or medical conditions affected by sudden movement.
Climate control, USB charging ports, and possibly entertainment systems provide comfort features. Some autonomous vehicles being tested include tablet computers with information about Las Vegas attractions, local news, and entertainment options. Windows provide views of the city, so passengers experience the ride actively rather than being passive consumers of transportation.
Passengers maintain a degree of control. They can adjust temperature, direct the vehicle's music or in-cabin entertainment systems, or request the vehicle pause at a location. If passengers feel unsafe for any reason, they can request immediate communication with a remote operator, who can assess the situation and provide assistance.
Dropoff and Payment
As the vehicle approaches the destination, interior displays count down remaining distance and estimated time. The vehicle executes the final turn and proceeds to the dropoff location, parking appropriately and signaling arrival. Passengers exit via automatically-unlocked doors, and payment is automatically processed through the app—no interaction with a driver, no need to calculate tips or manage cash. A digital receipt appears in the app, allowing passengers to dispute charges or provide feedback on the ride.
Postride feedback is crucial. Passengers rate the ride, the cleanliness of the vehicle, the accuracy of the route, and overall experience. They can report issues like uncomfortable temperature, the vehicle's handling of a particular traffic situation, or any problems. This feedback informs system improvements and helps identify vehicles requiring maintenance or recalibration.

Market Impact: Transformation of Urban Mobility and Employment
The Economics of Autonomous Rideshare
The fundamental economic advantage of autonomous vehicles is operational cost reduction. Human rideshare drivers earn wages or commissions, typically ranging from
This cost advantage translates into lower fares for passengers. An autonomous rideshare trip that costs
To model the economics: assume an autonomous rideshare vehicle costs
These improved economics could ultimately drive human rideshare companies out of business if they continue operating human drivers while competitors operate autonomous vehicles at lower cost. This creates pressure for the industry to transition to autonomy even if human drivers remain available.
Employment and Workforce Disruption
The employment implications are profound. In the United States, approximately 3.5 million people work as taxi drivers, rideshare drivers, or truck drivers. Autonomous vehicle deployment threatens these employment sectors. Unlike some technological disruptions that create new jobs to replace ones lost, autonomous vehicle deployment may not create sufficient replacement jobs. A self-driving taxi service employs far fewer people than the same service using human drivers—perhaps a few remote operators, dispatchers, and vehicle maintenance technicians, but not hundreds or thousands of drivers.
Las Vegas, as a major tourism hub, employs thousands of drivers in taxi services, rideshare, and hotel transportation. Widespread adoption of autonomous vehicles could displace substantial portions of this workforce. Workers aged 40+ with primarily driving experience may find retraining difficult, and alternative employment opportunities in Las Vegas may not exist. Potential solutions include retraining programs, transition assistance, and possibly new job categories in autonomous vehicle maintenance and operations, but these likely don't fully offset job losses.
Society will need to address these employment disruptions through policy mechanisms: enhanced unemployment insurance during transitions, retraining programs, and possibly new economic models like universal basic income or job guarantee programs. The transition from human-driven to autonomous vehicles will likely span decades, providing time for workforce adaptation, but the trajectory is clear. This transformation is one of the most significant long-term implications of autonomous vehicle deployment.

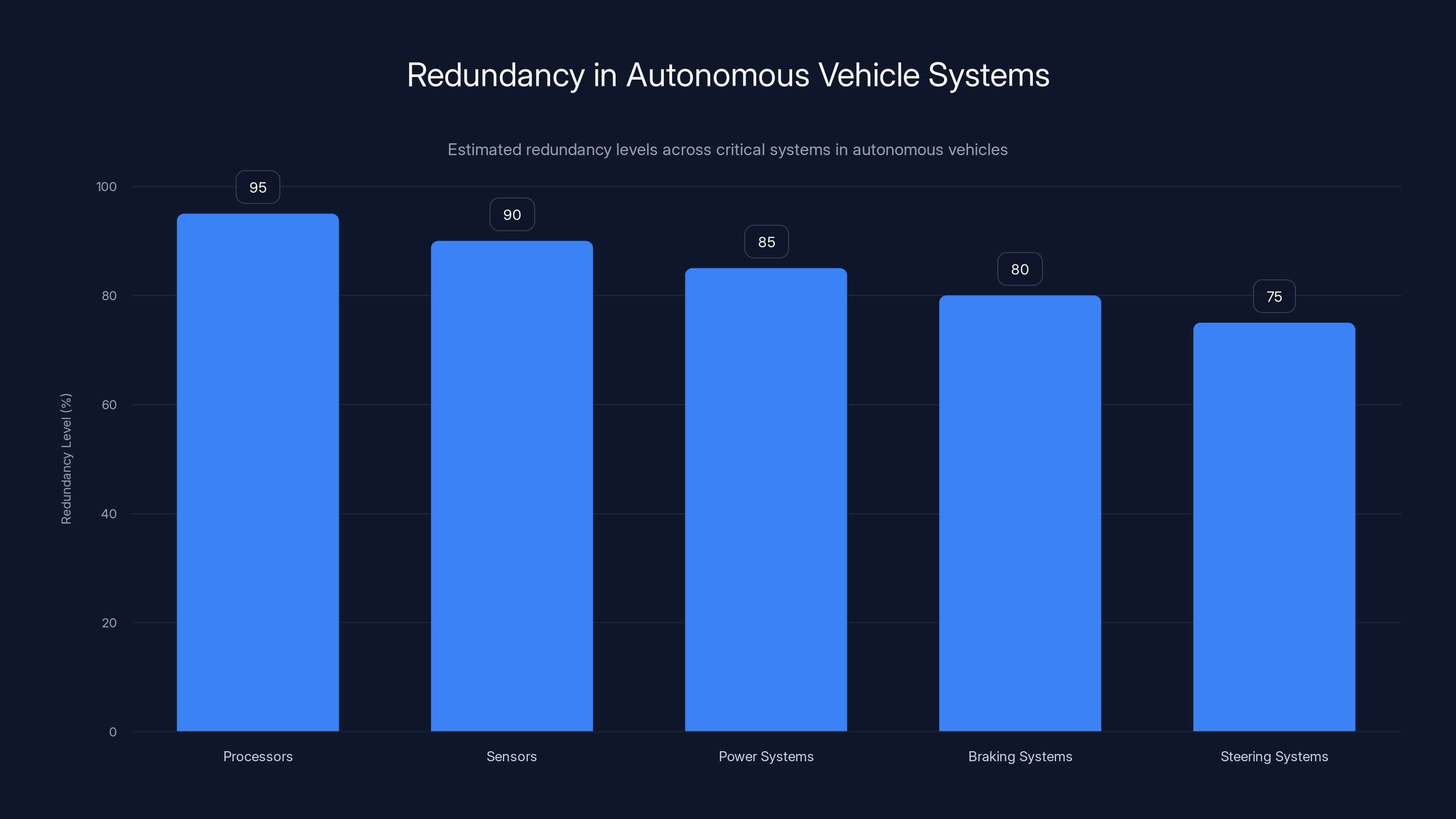
Estimated data suggests processors and sensors have the highest redundancy levels, ensuring fault tolerance in autonomous vehicles. Estimated data.
Regulatory Framework and Public Policy Considerations
Nevada's Autonomous Vehicle Regulations
Nevada has been at the forefront of autonomous vehicle regulation. The state enacted some of the first regulations permitting autonomous vehicle testing on public roads and has since expanded these frameworks to allow commercial operation. Nevada's regulatory approach provides a template for other jurisdictions considering autonomous vehicle deployment.
Key elements of Nevada's framework include: vehicles must be equipped with safety systems meeting specified requirements, operators must maintain records of autonomous miles driven and any incidents, developers must carry insurance meeting specified minimums, and vehicles must be tested on closed courses before public road operation. Initial deployment is limited to specific geographic areas, with expansion requiring additional testing and regulatory approval. Vehicles must be clearly marked as autonomous so that other drivers understand what they're encountering.
This regulatory approach balances innovation support with public safety. It permits testing and deployment while establishing standards that protect public safety. Other states will likely adopt similar frameworks, creating a patchwork of regulations with state-level variation in autonomous vehicle policies.
Liability and Insurance Questions
One of the most complex regulatory questions involves liability for accidents involving autonomous vehicles. Under current law, drivers and vehicle owners are responsible for accident-related liability. As vehicles operate autonomously, responsibility becomes ambiguous. Is the passenger-owner liable? The vehicle manufacturer? The software developer? The ride-hailing platform operating the vehicle? Legal frameworks will need to clarify liability allocation, which in turn affects insurance requirements and costs.
One emerging model involves manufacturers maintaining liability for software failures while passengers or platforms maintain liability for operational decisions (like accepting a trip in dangerous conditions). This division reflects responsibility: the manufacturer controls the vehicle's design and software, while operators control deployment decisions. Insurance models will likely evolve to reflect these responsibility divisions.
Federal Policy and Standards Development
While Nevada leads state-level regulation, federal policy frameworks continue developing. The National Highway Traffic Safety Administration (NHTSA) has issued guidance for autonomous vehicle manufacturers and is developing standards that may eventually become federal requirements. Federal standards could establish safety testing protocols, define cybersecurity requirements, establish data recording standards, and clarify manufacturer responsibilities.
Federal involvement helps prevent regulatory fragmentation—where manufacturers would face different requirements in each state—which would complicate vehicle design and deployment. Harmonized federal standards reduce compliance costs and accelerate adoption. International standards development is also underway, though countries are taking varied approaches. Europe emphasizes precautionary principles requiring extensive testing before deployment, while the United States leans toward faster innovation cycles with real-world learning.

Comparing Autonomous Solutions: Where Hyundai-Motional Stands
Competitive Landscape
Hyundai-Motional isn't the only player pursuing autonomous vehicle commercialization. Competitors include Waymo (the Google subsidiary), Cruise (formerly General Motors' autonomous vehicle division, which paused operations following a safety incident), Baidu's Apollo platform, and various startups. Each competitor has taken somewhat different technological approaches and pursued different markets.
Waymo has deployed autonomous taxi services in Phoenix and other cities, with more services planned. Waymo developed its technology independently rather than partnering with traditional automakers, which enabled faster innovation but created manufacturing and distribution challenges. Baidu's Apollo platform focuses on Chinese markets and partnerships with local manufacturers. Cruise, before its pause, was developing autonomous delivery services in San Francisco alongside autonomous taxi services.
Hyundai-Motional's approach combines Motional's proven autonomous driving software with Hyundai's manufacturing infrastructure and automotive expertise. This partnership offers advantages: Hyundai's production capability enables scaling more rapidly than pure software companies; Motional's autonomous platform is based on years of testing and development; and the partnership combines software excellence with automotive reliability. However, the partnership also involves more organizations in decision-making, potentially complicating rapid innovation.
Technology Comparison
The underlying autonomous driving technologies used by different companies are roughly equivalent in capability. Most major platforms use combinations of lidar, camera, and radar; employ deep learning neural networks for perception and decision-making; include geofencing and remote monitoring for safety; and conduct extensive testing before deployment. The differences lie in implementation details: sensor configurations, processing algorithms, software architecture, and operational procedures.
Sensor configuration choices reflect different design philosophies. Waymo's vehicles include multiple lidar units providing 360-degree coverage, a choice reflecting the company's emphasis on perception redundancy. Some competitors use fewer lidar units and rely more heavily on camera and radar data. Each approach involves tradeoffs between cost, complexity, and safety margins.
Software differences are harder to assess from outside, but they likely center on decision-making approaches, handling of edge cases, and optimization for specific operating conditions. Software designed for highway driving differs from software optimized for dense urban environments. Different companies likely handle challenging scenarios slightly differently based on their training data and development philosophies.

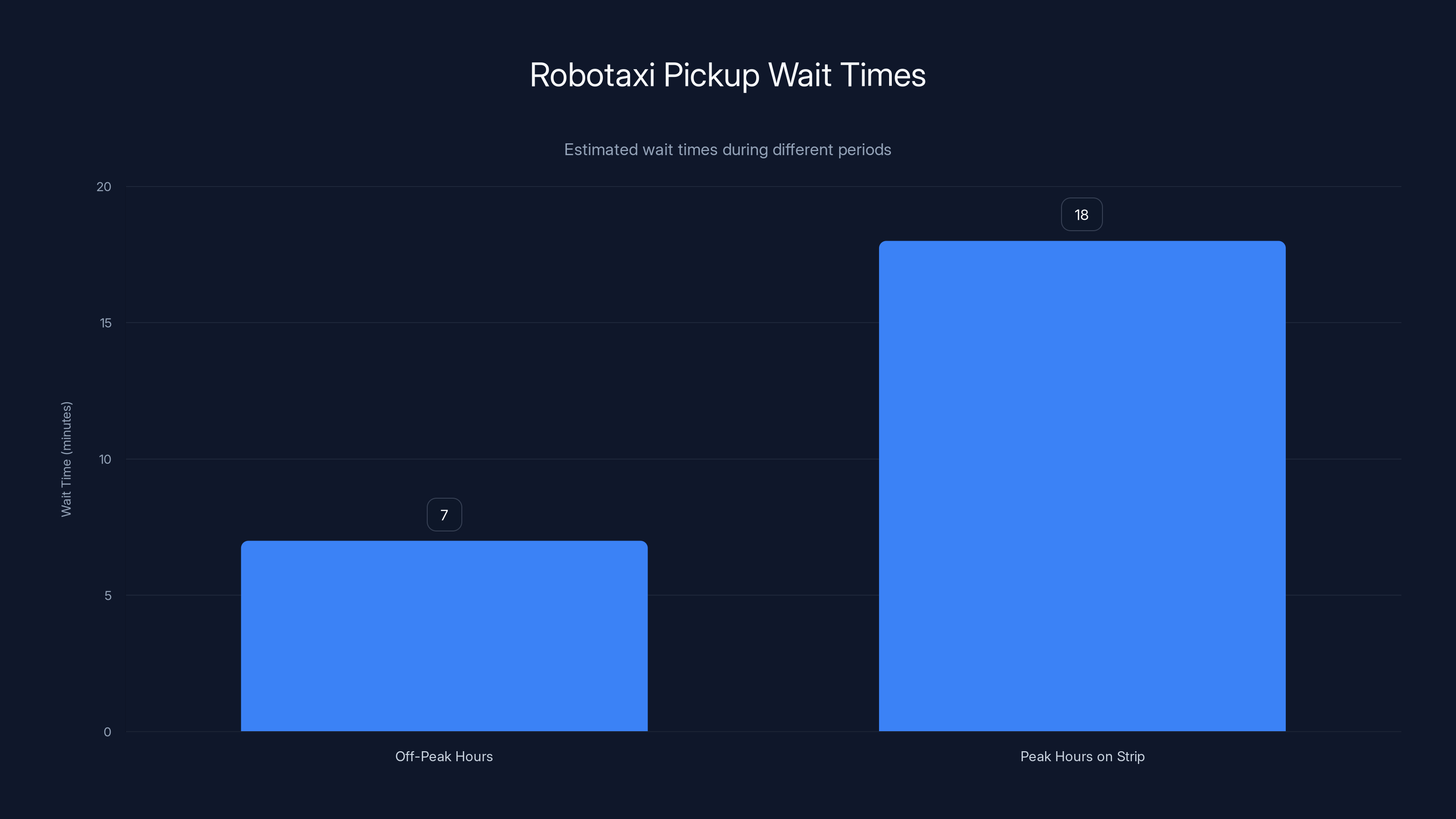
During off-peak hours, passengers can expect an average wait time of 7 minutes, while during peak hours on the Strip, wait times can extend to 18 minutes. Estimated data based on typical rideshare patterns.
Challenges and Limitations: What Still Needs Solving
Extreme Weather and Environmental Conditions
Autonomous vehicles perform well in conditions where they were tested and trained. Las Vegas offers favorable conditions in many respects: moderate climate variation, generally clear skies, and well-maintained roads. But many regions experience challenging weather: heavy rain, snow, ice, dense fog, or sandstorms that degrade sensor performance dramatically.
Snow presents particular challenges. Lidar and camera systems trained on clear conditions perform unpredictably when snow and ice are present. Lane markings might be invisible under snow cover, yet the vehicle must still understand where lanes are. Other vehicles' behavior becomes less predictable—ice or snow affects acceleration and braking differently than normal asphalt. The system's models trained on normal driving conditions don't apply well to snowy conditions.
Heavy rain affects camera quality and can degrade lidar performance through rain-related interference. Fog similarly reduces visibility to levels that challenge all sensor types. For autonomous vehicles to achieve true nationwide or worldwide deployment, they must reliably handle adverse weather, which requires additional development, testing, and sensor innovation. Near-term, autonomous vehicle services will likely concentrate in regions with more favorable weather.
Edge Cases and Unusual Scenarios
Autonomous driving systems train on vast datasets of normal driving, but driving includes rare, unusual events that occur perhaps once in millions of miles but must be handled correctly. Police officers directing traffic at accident scenes. Active construction zones with temporary lane markings. Flooded roadways from severe weather. Debris in roadways. Malfunctioning traffic signals. Emergency vehicles with lights and sirens requiring traffic to move aside.
The system's training data might include examples of some of these situations, but not all. Real-world deployment inevitably encounters scenarios the system wasn't specifically trained to handle. These situations test the system's generalization capabilities—its ability to apply learning from similar scenarios to novel situations. When the system encounters something truly unexpected, failsafe operation is crucial: safe speed reduction, notification of remote operators, and avoiding actions with uncertain outcomes.
Improving edge case handling requires continuous learning from deployed vehicles. Each unusual scenario encountered provides data informing future system improvements. This creates a virtuous cycle: more deployed vehicles generate more data about unusual scenarios, enabling system improvements that handle edge cases better, reducing disengagements and improving reliability. But the early vehicles face the challenge of handling scenarios the system hasn't been extensively trained on.
Cybersecurity and Hacking Vulnerabilities
Autonomous vehicles are computers on wheels, and any computer can be hacked. Potential vulnerabilities include remote control via compromised communication channels, malicious code injection into the vehicle's computer systems, sensor spoofing (providing false sensor data), or network attacks targeting backend systems. A successful attack could potentially cause the vehicle to behave dangerously—accelerating unexpectedly, steering toward obstacles, or disabling brakes.
The automotive industry has extensive experience with vehicle cybersecurity, but autonomous vehicles present new attack surfaces. The vehicle maintains continuous communication with backend systems for updates, remote monitoring, and data collection. These communication channels could be compromised. The vehicle's computing systems are far more complex than traditional vehicle systems, potentially creating more security vulnerabilities.
Cybersecurity for autonomous vehicles remains an active research area. Manufacturers implement security measures including encrypted communications, secure boot processes, access controls, and intrusion detection systems. But new vulnerabilities likely remain undiscovered, and as autonomous vehicles become more common, malicious actors will devote increasing attention to finding vulnerabilities. This cybersecurity challenge persists throughout autonomous vehicle deployment and requires ongoing attention.
The Path Forward: Timeline and Expansion Plans
2025 and Beyond: Las Vegas Deployment Timeline
Hyundai and Motional have committed to deploying robotaxis on the Las Vegas Strip during 2025, representing the public launch of their commercial autonomous rideshare service. This timeline, while specific, likely refers to limited deployment in a defined area rather than comprehensive service across the entire Las Vegas metropolitan area. Initial deployment probably focuses on the Strip and nearby areas with favorable geography, consistent traffic patterns, and good cellular coverage for remote monitoring.
The first phase likely involves limited service hours, possibly excluding overnight hours when system monitoring would be more challenging. Service might exclude extreme weather days or special events creating unusually chaotic traffic. Gradually, as system reliability is validated and operational procedures are refined, the service expands to more hours, more areas, and more challenging conditions. A reasonable expectation would see meaningful service covering the entire Strip and downtown Las Vegas by late 2025 or early 2026, assuming no major technical or operational problems.
Expansion to other cities would follow, likely beginning with other Nevada cities, then potentially to other states with supportive regulatory frameworks. California, Arizona, and other states with existing autonomous vehicle testing programs represent probable targets for expansion. Cities like Phoenix (where Waymo is already operating), San Francisco, and Los Angeles represent natural expansion targets given their size, existing autonomous vehicle interest, and regulatory frameworks that might already support commercial operation.
Technology Evolution During 2025-2030
The next five years will see significant evolution in autonomous vehicle capabilities even as initial services launch. Computing power will increase, allowing more complex processing and better decision-making. Sensor technology will improve—new lidar designs with longer range and better performance in adverse weather, higher-resolution cameras, and more robust radar systems. Deep learning algorithms will improve, incorporating learning from deployed vehicles to enhance system performance.
The fleet's composition will likely shift toward purpose-built autonomous vehicles rather than modified conventional vehicles. As production volumes increase, purpose-built autonomous platforms offering optimal sensor placement, processing architecture, and passenger comfort will replace vehicles modified from human-driving designs. These purpose-built vehicles will be more efficient, safer, and offer better passenger experiences than current modifications of existing vehicle platforms.
Vehicle-to-infrastructure communication will likely become more prevalent. As cities implement traffic management systems that communicate with connected vehicles, autonomous vehicles can receive real-time traffic signal information, construction alerts, and hazard warnings. This V2I communication (vehicle-to-infrastructure) dramatically reduces the system's reliance on visible signals and autonomous interpretation of driving conditions, improving safety and efficiency.

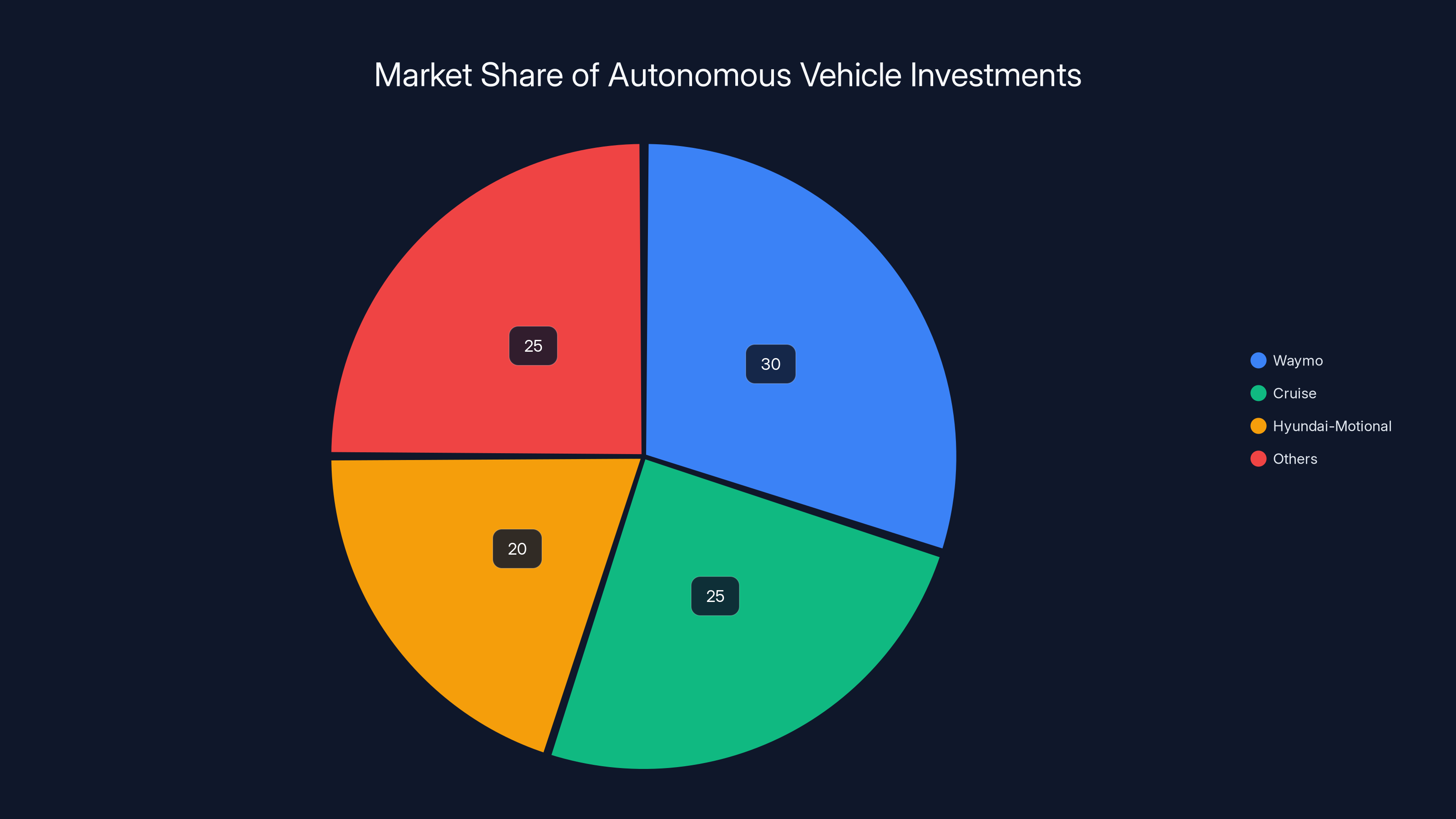
Estimated data shows Waymo, Cruise, and Hyundai-Motional as major players in autonomous vehicle investments, reflecting their substantial market influence.
Economic and Social Implications: Beyond Transportation
Urban Planning and Infrastructure Transformation
Widespread autonomous vehicle adoption would fundamentally reshape urban infrastructure. Today, cities require vast parking spaces for vehicles that sit idle most of the time. Autonomous rideshare services eliminate the need for private vehicle ownership in urban areas—why own a vehicle that costs
This transformation would particularly benefit dense urban areas where parking consumes enormous space. A typical city might devote 15-30% of land area to vehicle parking, much of it single-story surface lots in urban cores. Reclaiming this land creates opportunities for residential development, addressing housing shortages in many cities, or creating public spaces, improving quality of life.
Road capacity would increase without building new roads. Today's traffic congestion partly reflects inefficient vehicle utilization—private cars carry an average of 1.1-1.5 people while sitting in traffic. Autonomous rideshare vehicles would operate at much higher utilization, with vehicles carrying multiple passengers in sequence and potentially ride-pooling (multiple passengers in the same vehicle heading to similar destinations). Higher vehicle utilization means current roads can move more people with less traffic, despite reduced vehicle ownership.
Public transportation might evolve rather than disappear. Autonomous minibuses could serve routes with lower demand, replacing fixed-route buses on routes serving few passengers. Autonomous vans could provide first-mile/last-mile service connecting people to transit hubs, solving one of public transit's weakest links. The combination of autonomous rideshare and optimized public transit could provide better overall mobility than either system alone.
Environmental Impacts
Autonomous vehicles, particularly electric autonomous vehicles, offer significant environmental benefits. The electric drivetrain eliminates tailpipe emissions in cities, improving air quality and reducing urban air pollution health impacts. Electricity generation's environmental impact depends on the grid's power sources—a grid powered by renewables offers much greater environmental benefits than a coal-dominated grid—but electric vehicles are cleaner on virtually any grid compared to conventional internal combustion vehicles.
Smoother autonomous driving patterns—gentle acceleration and deceleration, avoiding aggressive driving—improve fuel efficiency even for vehicles with combustion engines. Autonomous rideshare vehicles operating at high utilization generate far fewer emissions per passenger-mile compared to private vehicles driven short distances at low occupancy. The combination of electrification and rideshare-based models could reduce urban transportation's climate impact by 50-70% compared to current models.
Vehicle manufacturing would shift toward models optimized for frequent use rather than occasional use. Private vehicles might last 150,000 miles (10-12 years of typical ownership) despite much higher engineering quality, while autonomous rideshare vehicles might be designed for 500,000+ miles over their economic lifetime. This extends effective lifetime and reduces manufacturing's per-mile environmental impact, though it requires more durable engineering and more frequent component replacement.
Social Equity and Access Considerations
Autonomous vehicles' democratizing potential—enabling people without cars to access transportation—conflicts with commercial pressures toward premium pricing. If autonomous rideshare services charge surge prices during peak demand (matching human rideshare practices), they may remain inaccessible to lower-income populations despite lower average prices. Managing these tradeoffs requires policy intervention: potentially subsidized fares for low-income users, integration with public transit subsidies, or regulations capping surge pricing.
For disabled populations, autonomous vehicles offer transformative benefits. Individuals unable to drive (due to age, disability, or medical conditions) could gain substantial mobility with autonomous services. Vehicles could be designed for wheelchair accessibility, offering independence that public transit or human-driven services might not provide. Elderly populations could maintain mobility longer, preserving independence and quality of life.
Conversely, autonomous vehicle deployment could increase transportation inequality if not carefully managed. If autonomous services operate only in dense, profitable urban areas and ignore low-demand areas, they could reinforce geographic inequality. Coordination between public agencies and commercial operators would be necessary to ensure equitable service coverage and affordability, particularly for transit-dependent populations.

Looking Beyond Las Vegas: Global Autonomous Vehicle Development
International Competition and Different Approaches
Autonomous vehicle development is not exclusively an American endeavor. China's Baidu has developed the Apollo autonomous driving platform and is deploying autonomous vehicles in multiple Chinese cities. The Chinese approach emphasizes rapid real-world testing and deployment with less regulatory hesitation than the United States. Europe is advancing autonomous technology through companies like Waymo (which has some European operations) and Mobileye (an Intel subsidiary). Japan, Germany, and other developed nations all have active autonomous vehicle programs.
Different regions' approaches reflect cultural and regulatory differences. The United States emphasizes private sector innovation with relatively light-handed regulation. Europe emphasizes thorough testing and validation before deployment, with more extensive regulatory frameworks. China emphasizes rapid deployment and real-world learning. These different approaches likely result in different timelines for autonomous vehicle availability but convergence on proven technologies over time.
International competition accelerates technological progress. Companies that successfully commercialize autonomous vehicles first gain first-mover advantages, experience learning that competitors can't match, and build market position. This competition incentivizes rapid but careful development, balancing speed with safety considerations. The Las Vegas deployment represents an important milestone in this global competition.
Different Use Cases Beyond Robotaxis
Autonomous vehicles will serve many purposes beyond ridesharing. Autonomous delivery vehicles could reduce shipping costs for last-mile delivery, making e-commerce more economical and accessible. Autonomous trucks could transform long-haul trucking, improving efficiency and safety while addressing driver shortages. Autonomous shuttle services could provide affordable public transportation in underserved areas. Autonomous vehicles could transport goods in warehouses and factories, and assist in hazardous environments where exposing humans to danger is undesirable.
Each use case involves different requirements and challenges. Delivery vehicles operate on regular routes with fewer traffic interactions than taxis, potentially simplifying requirements. Truck driving on highways is less complex than urban navigation but involves higher speeds and longer hours. Warehouse operation involves controlled environments with minimal regulatory requirements. Success in one domain doesn't automatically translate to others, so multiple parallel development pathways are advancing different use cases.

Practical Considerations for Las Vegas Tourists and Residents
When and How to Use the Service
Once launched, the Hyundai-Motional robotaxi service will be most practical for specific use cases. Getting to and from hotels and casinos on the Strip represents the primary use case—tourists arriving by air could take robotaxis from the airport, and from hotels and casinos to restaurants and entertainment venues. The service should be reliable for these routes given the controlled geographic area and regular traffic patterns.
Using the service will be straightforward for those comfortable with smartphone apps (the booking mechanism). The experience should feel similar to existing rideshare services but without human driver interaction. For those unfamiliar with app-based rideshare or uncomfortable with autonomous vehicles, the service may feel unnatural or unsettling initially, though this perception will likely diminish as the service operates reliably.
The service may not be ideal for luggage-heavy trips (the vehicles may have limited cargo space) or for trips outside the initial operational areas. It may not operate during extreme weather or special events when traffic becomes unusually chaotic. Users should maintain expectations realistic to the technology's current capabilities—reliable, safe operation within defined areas under normal conditions, but potentially less flexibility than human-driven alternatives.
Pricing Expectations
Exact pricing hasn't been announced, but reasonable estimates suggest fares of
Compared to the cost of vehicle rental (often

Addressing Common Concerns and Misconceptions
Safety Concerns
A frequent concern is whether autonomous vehicles are safe enough. The answer depends on comparative standards. Compared to human drivers? Autonomous vehicles in testing have demonstrated safety at least equal to human drivers, with some measures showing significant advantages. Compared to perfect driving? No vehicle is perfect; autonomous vehicles make mistakes, though different mistakes than humans make.
The regulatory approach addresses this through extensive testing and validation before commercial deployment. Vehicles meeting regulatory standards have been proven safe in controlled testing. Real-world deployment will further validate safety through continuous monitoring and data collection. Any accidents receive scrutiny that informs system improvements.
Rational risk assessment should recognize that transportation inherently involves risk, and autonomous vehicles don't eliminate risk but potentially reduce it. The relevant question isn't whether autonomous vehicles are perfectly safe, but whether they're safer than current transportation alternatives. For many use cases, the answer appears to be yes.
Human Control and Predictability
Some resist autonomous vehicles because they prefer human drivers' flexibility and ability to adapt to unusual situations. This reflects a valid concern: human drivers can make creative decisions that rigid autonomous systems might not. However, human drivers also make poor decisions (drinking and driving, using phones while driving, falling asleep), introduce emotional escalation in conflicts, and commit aggressive acts. Autonomous systems avoid these human failure modes while sacrificing some human flexibility.
The empirical question—which system (autonomous or human-driven) produces better outcomes—should be answered by safety data. As autonomous vehicles log more real-world miles with fewer accidents, this concern becomes empirically testable rather than merely theoretical.
Job Losses and Economic Disruption
Concern about driving job losses is legitimate and not a misconception but a real challenge requiring genuine policy response. Society cannot simply dismiss the livelihoods of millions of drivers; addressing this transition requires retraining programs, unemployment assistance, and potentially new economic models to ensure workers disrupted by technological change receive adequate support. Acknowledging this challenge and developing policy responses strengthens public acceptance of the technology by demonstrating concern for affected workers.

The Role of Simulation and Testing Technology
Digital Twin and Simulation Environments
Before deploying autonomous vehicles in complex real-world environments, developers test extensively in simulated environments. Digital simulations can replicate traffic scenarios millions of times faster than real-world testing, enabling evaluation of system performance in countless situations. A scenario that occurs once in millions of real-world miles can be tested thousands of times in simulation.
Simulation environments model traffic, pedestrians, weather conditions, and vehicle dynamics, presenting autonomous systems with virtual scenarios and evaluating their performance. This allows engineers to test extreme scenarios (system failure modes, emergency situations) that would be dangerous to test in actual vehicles. Simulation can also accelerate development: evaluating ten different algorithm versions through millions of simulated miles informs which version to test in real vehicles, dramatically accelerating development.
Motional's development of the Las Vegas robotaxi has almost certainly involved extensive simulation testing. The company likely simulated Las Vegas traffic patterns, Strip-specific challenges, and countless edge cases before committing vehicles to real-world testing. This simulation-first approach improves development efficiency and safety by catching problems before real vehicles encounter them.
Real-World Testing Programs
Beyond simulation, real-world testing on public roads is essential. Simulations, however sophisticated, don't capture all real-world phenomena. Actual traffic behavior, weather conditions, sensor performance, and passenger reactions differ from simulations in ways that matter. Real-world testing validates that systems performing well in simulation actually perform well in reality.
Motional and Hyundai have conducted years of real-world testing before the Las Vegas commercial deployment. This testing accumulates miles and incidents, providing data demonstrating that the system performs reliably in actual conditions. The graduated deployment approach—starting with limited routes and hours, expanding as reliability is validated—continues this testing philosophy: validate performance in controlled circumstances before expanding operations.

Integration with Smart City Infrastructure
Vehicle-to-Infrastructure Communication
As cities develop smart infrastructure, autonomous vehicles will increasingly integrate with these systems. Traffic signal systems can communicate directly with autonomous vehicles, providing signal status information and allowing vehicles to optimize their approach speeds and turning paths. This V2I (vehicle-to-infrastructure) communication reduces the system's reliance on interpreting visible signals and enables smoother traffic flow.
Infrastructure can also communicate about road conditions, hazards, and temporary restrictions. A road closure due to construction can be communicated directly to vehicles, allowing them to reroute appropriately. Hazardous road conditions (icy patches, potholes, debris) can be reported, enabling vehicles to slow down and navigate carefully. This information exchange benefits not only autonomous vehicles but all connected vehicles, improving transportation system performance.
Data Collection and City Planning
Autonomous rideshare services will generate enormous amounts of data about transportation patterns, demand, vehicle utilization, and road usage. Cities can leverage this data for transportation planning, identifying bottlenecks, optimization opportunities, and infrastructure needs. Demand patterns revealed through rideshare data inform public transit planning—which routes should receive enhanced service? Where do people most need transportation?
This data must be managed carefully to protect privacy—aggregating information without identifying individuals—but properly anonymized data is valuable for urban planning. Cities that develop policies encouraging data sharing while protecting privacy could gain significant advantages in transportation efficiency and quality of life.

Financial and Investment Perspectives
Market Size and Revenue Potential
The global transportation market is enormous. Ride-hailing services alone represent a market worth tens of billions of dollars annually. Autonomous vehicles could capture substantial portions of this market at higher margins than human-driven services, making the market highly attractive to investors and operators.
Las Vegas represents a valuable initial market. With 40+ million annual visitors and over 600,000 residents, the potential for transportation services is substantial. If autonomous rideshare captures even 10% of Las Vegas transportation needs, it represents millions of daily trips with significant revenue potential. Scaling to other cities multiplies this revenue exponentially.
Investment in autonomous vehicle technology has been substantial—billions of dollars from companies like Google (Waymo), General Motors (Cruise), and others. The Hyundai-Motional partnership represents just one of many significant players investing in autonomous vehicle commercialization. Strong market demand and high profit potential justify this investment level.
Valuation and Investor Sentiment
Autonomous vehicle companies' valuations reflect high expectations for the technology's transformative potential. Waymo has been valued at $30+ billion despite limited revenue to date, reflecting investor belief in the enormous long-term market opportunity. Similar valuations for other companies reflect confidence that autonomous vehicles represent a transformative technology with multibillion-dollar market potential.
This high valuation creates pressure for rapid commercialization—investors expect revenue and profitability justifying these valuations. The Las Vegas deployment represents important progress toward revenue-generating autonomous vehicle services. Successful, safe, profitable service in Las Vegas creates investor confidence and justifies continued investment in expansion to other markets.

Conclusion: The Future of Autonomous Transportation
Hyundai-Motional's Position in the Evolving Market
The Hyundai-Motional autonomous robotaxi represents more than just a new transportation service. It exemplifies the maturation of autonomous vehicle technology from research projects to genuine commercial products. The combination of Motional's advanced autonomous driving platform with Hyundai's manufacturing and automotive expertise creates a competitive offering in the increasingly crowded autonomous vehicle market.
Competition among autonomous vehicle developers—Waymo, Cruise, Baidu, and others—drives rapid advancement and helps ensure that successful technologies improve quickly. Hyundai-Motional's entry into commercial services with a credible technology and experienced partners positions them well in this competitive landscape. The company's automotive manufacturing background provides advantages in vehicle production that pure software companies lack.
Success in Las Vegas will significantly influence Hyundai and Motional's future trajectories. A successful, safe, profitable service validates their technology approach and competitive positioning. Failures or safety issues would hamper the company's market position and set back the broader autonomous vehicle industry. The stakes are genuinely high, creating strong incentives for careful development and operation.
Broader Implications for Transportation and Society
The Las Vegas robotaxi represents an inflection point in transportation history. For the first time, fully autonomous vehicles are deploying on genuine public roads (not limited test areas) for commercial purposes (not research), with intent to serve real customers (tourists and residents, not researchers). This transition from research to commerce fundamentally changes how we should think about autonomous vehicles—they're becoming real, deployable technology rather than perpetually-future technology.
Realizing the full benefits of autonomous vehicles requires more than just deploying successful vehicles. It requires adapting regulatory frameworks, addressing employment disruption through policy, integrating vehicles with smart city infrastructure, and managing the many externalities (privacy, cybersecurity, equity) that such a major transportation transformation entails. Success requires not just technical excellence but also thoughtful engagement with the broader societal implications.
The coming five years will be crucial in determining whether autonomous vehicles become a transformative technology delivering widespread benefits or remain a niche offering in limited markets. The Las Vegas deployment provides evidence of technical feasibility. Widespread adoption depends on achieving safety performance convincing regulators and the public, maintaining profitability that incentivizes continued deployment, managing employment transition fairly, and ensuring that autonomous vehicles improve rather than worsen transportation equity.
A Transformative Era
We stand at the beginning of a transportation revolution. The Hyundai-Motional robotaxi on the Las Vegas Strip isn't an isolated curiosity but rather the leading edge of technology that will transform how billions of people move through cities over the coming decades. The success or failure of these initial deployments will reverberate through the transportation industry, urban planning decisions, environmental policy, and workforce development for years to come.
The implications extend beyond transportation itself. Autonomous vehicles represent a broader theme of AI and automation transforming industries that currently employ millions of people. How society manages this transition—whether we develop policies ensuring that the benefits are widely shared and workers disrupted by automation receive adequate support—will influence trust in AI development and deployment more broadly.
The journey from Las Vegas deployment to truly transformative transportation change will be complex, involving technical challenges, regulatory adaptation, economic disruption, and enormous investments. But the fundamental trajectory seems clear: autonomous vehicles are transitioning from research projects to commercial reality. The question is not whether this transformation will happen but how quickly it will occur and how effectively society will manage its implications. The robotaxis rolling down the Las Vegas Strip represent the beginning of this transformation, not its conclusion.

FAQ
What is a fully-autonomous robotaxi?
A fully-autonomous robotaxi is a driverless vehicle that operates without human control, using sensors, computer systems, and artificial intelligence to navigate roads, recognize obstacles, follow traffic rules, and transport passengers safely. Unlike conventional taxis that require a human driver, robotaxis make all driving decisions autonomously, though remote operators may monitor systems and intervene in emergency situations.
How does Hyundai's autonomous vehicle technology work?
Hyundai's autonomous vehicles utilize Motional's autonomous driving platform, which combines multiple sensor types (lidar, cameras, and radar) to perceive the environment, advanced AI algorithms to make driving decisions, and computing systems that process data in real-time. The system continuously maps surroundings, predicting movements of other vehicles and pedestrians while navigating according to traffic rules and route planning.
When will the Las Vegas robotaxi service launch?
Hyundai and Motional have committed to deploying robotaxis on the Las Vegas Strip during 2025, with initial service likely launching in the latter half of the year. Early deployment will probably focus on specific routes and hours, gradually expanding as reliability is validated and operational procedures are refined.
What are the main safety features of the robotaxi?
Key safety features include redundant sensor systems where lidar, camera, and radar provide backup if one system fails, multiple independent computing systems that cross-check decisions, geofencing that restricts operation to tested areas, 360-degree sensor coverage providing comprehensive environmental awareness, and remote monitoring systems where operators can observe vehicle status and intervene if needed. The vehicles also undergo extensive testing both in simulation and real-world conditions before deployment.
How much will a ride in the autonomous robotaxi cost?
While exact pricing hasn't been officially announced, industry analysis suggests fares will likely range from
What areas will the robotaxi service initially cover?
Initial deployment will focus on the Las Vegas Strip and immediately surrounding areas where the vehicle has been extensively tested and traffic patterns are well-understood. Expansion to downtown Las Vegas, the airport, and other areas will occur gradually as the service proves reliable and operations are optimized. The service will initially operate during daylight and evening hours, with overnight service potentially added as the system proves reliability.
How does the robotaxi handle bad weather or unexpected road conditions?
The autonomous system can handle moderate weather conditions through redundant sensors and AI trained on various weather scenarios. However, extreme weather significantly degrades autonomous vehicle performance. Initial Las Vegas deployment will likely not operate during severe weather, which is relatively infrequent in the region. For unexpected road conditions like construction or accidents, the system identifies them through sensors and can navigate appropriately, or remote operators can intervene if the situation exceeds the vehicle's capabilities.
Will human drivers still be necessary in autonomous vehicles?
The Hyundai-Motional robotaxi is designed for fully autonomous operation without onboard human operators. However, remote monitoring centers employ operators who observe vehicle performance and can intervene in emergency situations. The vehicles will require maintenance technicians and backend support staff, but not human drivers to provide transportation.
Is the robotaxi safe compared to human drivers?
Autonomous vehicles in testing have demonstrated safety records at least equal to human drivers, with several studies showing lower accident rates. The system lacks human driver failure modes like impairment, distraction, and aggressive behavior. However, autonomous vehicles make different types of errors than humans. Safety validation continues through extensive testing and will be validated further through real-world operation. Regulatory approval required for deployment means the vehicles have met safety standards regulators deemed adequate.
What happens if the autonomous vehicle system fails while driving?
The vehicle includes multiple redundancy systems—if one system fails, others maintain operation. The system continuously monitors its own health and components. If it detects a failure it cannot safely manage, it enters failsafe mode: reducing speed, moving to the roadside, and stopping. Remote operators are immediately notified and can assess the situation. Multiple safety layers mean that single failures are managed without putting passengers at risk.
How will this affect taxi and rideshare drivers in Las Vegas?
Wide-scale autonomous vehicle adoption would significantly reduce demand for human drivers in Las Vegas, where transportation represents a substantial portion of employment. This job displacement is a genuine concern requiring policy responses: driver retraining programs, transition assistance, unemployment insurance, and potentially new job categories in autonomous vehicle maintenance and operations. Society will need to address these employment disruptions through comprehensive workforce development policies.
Can passengers override the autonomous system or take manual control?
The robotaxi isn't designed for passenger control—it's a fully autonomous service similar to public transit rather than a rental car. Passengers cannot take manual control of the vehicle. However, passengers can communicate with remote operators through in-vehicle cameras and microphones if they experience problems, need assistance, or feel unsafe, allowing operators to provide guidance or address the situation remotely.

Key Takeaways
- Hyundai-Motional's fully-autonomous robotaxi represents a watershed moment in autonomous vehicle commercialization, moving from research to real-world commercial deployment
- Las Vegas provides an ideal proving ground due to environmental complexity, regulatory support, and built-in demand from tourists requiring on-demand transportation
- Core technology combines Motional's AI autonomous driving platform with sensor fusion (lidar, camera, radar), redundant computing systems, and real-time decision-making AI
- Safety validation involves extensive testing, geofencing to controlled areas, remote operator monitoring, and redundant failsafe systems across all critical functions
- Successful Las Vegas deployment could accelerate autonomous vehicle adoption in other cities, influence regulatory frameworks, and reshape urban transportation infrastructure
- Economic implications include labor displacement of 3.5+ million drivers, transformation of urban parking into other uses, and potential 50-70% reduction in transportation emissions
- Widespread adoption requires addressing policy challenges: workforce transition support, regulatory harmonization, cybersecurity standards, and equitable service access
- The Las Vegas deployment marks the beginning of transportation transformation that will reshape cities, employment, and mobility over coming decades

